文件系统使用指南
1. RootFS
借助于 Buildroot, 很多需要使用的工具可以直接被编译和安装到 RootFS, 如果希望将非依赖 Buildroot 独立编译的程序和文件放到 RootFS 中时,可使用 SDK 提供的RootFS Overlay 的机制来实现。
1.1. Overlay机制
RootFS Overlay 是指在制作 RootFS 镜像过程中,使用客制化的 RootFS 目录内容覆盖 output/target/ 中目录和文件的一个机制。

图 5.22 RootFS Overlay 机制
如上图所示,编译过程中生成的内容,安装到 output/target/ ,制作 RootFS 镜像时:
首先将
output/target/目录内容rsync到 RootFS 制作目录output/build/luban-fs/target/然后将指定的 RootFS Overlay 目录中的内容
rsync到 RootFS 制作目录output/build/luban-fs/target/如果配置了多个 RootFS Overlay 目录,则按顺序
rsync覆盖output/build/luban-fs/target/中的内容
通过上述机制,开发者可以将独立编译的程序和文件放在一个 RootFS Overlay 目录中,然后将该目录路径配置到对应的 <board>_defconfig,即可将这些程序和文件打包到 RootFS 镜像。
1.2. 默认 Overlay
SDK 给每个 Board 设置了一个默认的 Overlay 目录,可以按照需要的目录结构存储直接预制文件
target/d211/fpga_spinand/rootfs_overlay
1.3. 新 Overlay
Luban SDK 的 Overlay 支持多目录,增加新的 Overlay 目录的方案是:
- 打开配置界面
make menuconfig
- System configuration
System configuration --->
(target/$(LUBAN_CHIP_NAME)/$(LUBAN_BOARD_NAME)/rootfs_overlay) Root filesystem overlay directories
此处 ``target/$(LUBAN_CHIP_NAME)/$(LUBAN_BOARD_NAME)/rootfs_overlay`` 即为每一个板子的目录下的默认的 rootfs_overlay 目录。
-
添加新目录
RootFS Overlay 目录可以配置多个,不同目录之间使用
空格分开即可。如
target/$(LUBAN_CHIP_NAME)/$(LUBAN_BOARD_NAME)/rootfs_overlay test_rootfs
此处除了板子目录下的 ``rootfs_overlay`` 目录,还添加了 SDK 顶层目录下的 ``test_rootfs`` 目录。
1.4. 编译结果
在完成上述添加后,重新编译生成固件时三个目录将被合并构建 RootFS
- rootfs_overlay 和 test_rootfs 中的内容会被按顺序安装到
output/build/luban-fs/target/ output/build/luban-fs/target/内容被安装到output/target/中- 基于
output/target/生成 RootFS
2. 开机启动
RootFS /etc/init.d/ 目录可以设置开机初始化脚本�,这些脚本在登录之前被 linuxrc 执行。
小技巧
linuxrc 执行的内容和顺序可详细参考:package/third-party/busybox/inittab
Luban SDK 编译时,如何为项目安装开机初始化脚本?推荐如下几种方式
2.1. init.d 脚本
如果初始化脚本与某组件包相关,可以编写一个 init.d 脚本, 在该组件包安装文件时,将对应的脚本安装到 /etc/init.d/ 目录
2.1.1. 脚本
Linux 对 init.d 脚本有统一的要求,可以百度解决,此处给一个简单的例子: S99qtlauncher, 其中 S99 为优先级,99说明优先级比较低
#!/bin/sh
#
# Start qtlauncher....
#
DAEMON="/usr/local/qtlauncher/qtlauncher"
DAEMONOPTS=" -platform=linuxrc"
PIDFILE=/var/run/qtlauncher.pid
start() {
printf "Starting qtlauncher: "
PID=`$DAEMON $DAEMONOPTS > /DEV/NULL 2>&1 & echo $!`
if [ -z $PID ]: then
printf "Fail \n"
else
echo $PID >$PIDFILE
printf "OK \n"
fi
}
stop() {
printf "Stopping qtlauncher: "
PID=`cat $PIDFILE`
if [ -f $PIDFILE]; then
kill -HUP $PID
printf "OK \n"
rm -f $PIDFILE
else
printf "pidfile not found \n"
fi
}
case "$1" in
start)
start
;;
stop)
stop
;;
restart|reload)
stop
start
;;
*)
echo "Usage: $0 {start|stop|restart}"
exit 1
esac
exit $?
2.1.2. 安装
继续上文的 S99qtlauncher:
package/artinchip/qtlauncher/qtlauncher.mk
define QTLAUNCHER_INSTALL_TARGET_CMDS
$(INSTALL) -m 0755 -D package/artinchip/qtlauncher/S99qtlauncher \
$(TARGET_DIR)/etc/init.d/S99qtlauncher
endef
2.2. RootFS Overlay
如果该脚本与具体的组件包没有直接的关系,与项目相关性较大,或者不方便放到具体的组件包中,则可以 放到 target/<chip>/<board>/rootfs_overlay/ 目录,这样在生成 RootFS 镜像时,通过 Overlay 的方式 安装到镜像的 /etc/init.d/ 目录中。
具体可参考 RootFS 。
2.3. initscripts
/etc/init.d/ 目录是由 package/third-party/initscripts/ 包进行安装创建的, 也可以将相关初始化脚本放在该包中进行安装。
需要修改 package/third-party/initscripts/initscripts.mk 中的 INITSCRIPTS_INSTALL_TARGET_CMDS 。
注解
多数的脚本都有与之相关的组件包,建议尽量采用第一、第二种方式进行安装,并不建议将过多的脚本放到 initscripts 包中进行安装。
3. 系统分区
分区表的配置在 image_cfg.json 文件中完成,可以很容易的进行增删改查操作
3.1. 配置说明
image_cfg.json 是 SDK/target/<chip>/<board> 目录下描述如何生成烧录镜像的文件,其中的第一部分就是描述烧录的目标存储介质的分区设置。
3.1.1. eMMC
"mmc": { // Media type
"size": "8G", // Size of SD/eMMC
"partitions": { // Partition table apply to device
"spl_1": { "offset": "0x4400", "size": "128k" },
"spl_2": { "size": "367k" },
"uboot": { "size": "1m" },
"env": { "size": "512k" },
"kernel": { "size": "16m" },
"rootfs": { "size": "64m" },
"user": { "size": "64m" },
"data": { "size": "-" },
},
},
其中 mmc 有两个属性:
size
eMMC 存储设备的总大小(User Data Area)。
partitions
在该对象下,可以根据需要,按顺序添加分区,并且设置分区的开始位置和大小。
- offset: 分区的开始地址,相对 eMMC 0 地址的偏移。值应使用16进制字符串表示。如果 offset 没有出现,表示紧接上一个分区。
- size: 分区的大小,可使用
K, M, G单位。最后一个分区可以使用 “-” 代替,表示剩余所有的空间都分配给该分区。
注解
eMMC 的第一个分区,从 0x4400 开始,前面的 34 个 LBA 是保留给 GPT 分区表头用的。 SPL 分区,可以设置两个备份。从 0x4400 开始,每个分区大小 为 128KB。
3.1.2. SPI NOR
"spi-nor": { // Media type
"size": "16m",// Size of NOR
"partitions": {
"spl": { "size": "128k" },
"uboot": { "size": "768k" },
"env": { "size": "128k" },
"kernel": { "size": "6m" },
"rootfs": { "size": "5m" },
"user": { "size": "4m" },
"data": { "size": "-" },
}
},
其中 spi-nor 有两个属性:
size
SPI NOR 设备的总大小。
partitions
在该对象下,可以根据需要,按顺序添加 MTD 分区,并且设置分区的开始位置和大小。
- offset: 分区的开始地址,相对设备 0 地址的偏移。值应使用16进制字符串表示。如果 offset 没有出现,表示紧接上一个分区。
- size: 分区的大小,可使用
K, M, G单位。最后一个分区可以使用 “-” 代替,表示剩余所有的空间都分配给该分区。
注解
SPI NOR 的 SPL 可以设置两个备份分区。从 0 开始,每个大小128KB。 第二个备份分区可以不设置。
3.1.3. SPI NAND
"spi-nand": { // Device, The name should be the same with string in image:info:media:type
"size": "128m", // Size of SPI NAND
"partitions": {
"spl": { "size": "1m" },
"uboot": { "size": "1m" },
"env": { "size": "256k" },
"kernel": { "size": "12m" },
"ubiroot": {
"size": "32m",
"ubi": { // Volume in UBI device
"rootfs": { "size": "-" },
},
},
"ubisystem": {
"size": "-",
"ubi": { // Volume in UBI device
"user": { "size": "64m" },
},
"ubi": { // Volume in UBI device
"data": { "size": "-" },
},
},
}
},
其中 spi-nand 有两个属性:
size
SPI NAND 设备的总大小。
partitions
在该对象下,可以根据需要,按顺序添加 MTD 分区,设置分区的开始位置和大小,以及设置该 MTD 分区是否为 UBI 设备:
offset: 分区的开始地址,相对设备 0 地址的偏移。值应使用16进制字符串表示。如果 offset 没有出现,表示紧接上一个分区。
size: 分区的大小,可使��用
K, M, G单位。最后一个分区可以使用 “-” 代替,表示剩余所有的空间都分配给该分区。ubi
如果设置了该对象,则说明该 MTD 分区是一个 UBI 设备,可以进一步描述 UBI Volume 的划分。
在该对象下,可以根据需要,按顺序添加该 UBI 设备中的 Volume 描述,每一个 Volume 拥有下列属性:
- offset: Volume 的开始地址,相对 UBI 设备 0 地址的偏移。值应使用16进制字符串表示。如果 offset 没有出现,表示紧接上一个 Volume。
- size: Volume 的大小,可使用
K, M, G单位。最后一个 Volume 可以使用 “-” 代替,表示 UBI 设备剩余所有的空间都分配给该 Volume。
注意
SPI NAND 的 spl 分区大小,固定为1MB。里面包含 4 个 SPL 备份。
3.2. 启动相关分区
启动相关的分区,修改之后要注意同步修改 U-Boot 和 env.txt 中的配置。
3.2.1. U-Boot 所在的分区修改
U-Boot 所在的分区修改之后,对应 defconfig 中的位置也应该同步更新。
| eMMC | SPI NOR | SPI NAND |
|---|---|---|
| CONFIG_SYS_MMCSD_RAW_MODE_U_BOOT_SECTOR | CONFIG_SYS_SPI_U_BOOT_OFFS | CONFIG_SYS_SPI_NAND_U_BOOT_OFFS |
3.2.2. ENV 所在的分区修改
ENV 所在的分区修改之后,对应 defconfig 中的位置也应该同步更新。
| eMMC | SPI NOR | SPI NAND |
|---|---|---|
| CONFIG_ENV_OFFSET | CONFIG_ENV_OFFSET | CONFIG_ENV_OFFSET |
| CONFIG_ENV_OFFSET_REDUND | CONFIG_ENV_OFFSET_REDUND | CONFIG_ENV_RANGE |
| CONFIG_ENV_SIZE | CONFIG_ENV_SIZE | |
| CONFIG_ENV_SECT_SIZE |
3.2.3. RootFS 所在的分区位置变化
RootFS 所在的分区位置发生变化之后,需要修改 bootargs 相关的配置。相关的文件通常在
target/<chip>/common/env.txt
target/<chip>/<board>/env.txt
eMMC 的 root= 参数是自动生成的,但前提条件是 RootFS 分区名字要为 rootfs 。如果 RootFS 分区名字发生了改变, 应同步修改:
set_mmc_root=part number mmc ${boot_devnum} rootfs rootfs_part; \
setexpr rootfs_part ${rootfs_part} + 0; \
setenv mmc_root "/dev/mmcblk${boot_devnum}p${rootfs_part}";
SPI NOR 中的 RootFS 分区位置发生变化时,应同步修改:
nor_root=/dev/mtdblock4
SPI NAND 中的 RootFS 通常放在 UBI 中,如果相应的位置发生变化,需要同步修改:
nand_root=ubi0:rootfs
ubi_rootfs_mtd=4
4. 系统镜像
对于有镜像的分区,需要创建一个对应的镜像来烧录到该分区上, 该镜像的名字需要和 image_cfg.json 中的分区的名字一致,比如 user 分区, 本文介绍如何在编译时安装部分程序和数据到该分区的文件系统中,并且生成对应的文件系统镜像。
4.1. 镜像配置
SDK 目前支持用户最多生成三个不同的自定义文件系统镜像,需要在配置界面进行配置。
make menuconfig
根据需要勾选:
Filesystem images --->
[*] UserFS 1 --->
[ ] UserFS 2 --->
[ ] UserFS 3 --->
--- UserFS 1
(user) Name \\ 文件系统镜像名字,可修改,如 user
FS Type (UBIFS) ---> \\ 文件系统,支持Ext4、UBIFS、JFFS2、SQUASHFS,建议选择UFBIFS
(0x1000000) ubifs size(Should be aligned to MB) \\ Image的大小,需要和分区保持一致,单位为Byte
ubifs runtime compression (no compression) ---> \\ UBIFS 内部压缩算法
Compression method (no compression) ---> \\ Image 压缩方法
() Additional mkfs.ubifs options
() Overlay directory
注意
使用 JFFS2 文件系统时,需要 make kernel-menuconfig 失能 CONFIG_MTD_SPI_NOR_USE_4K_SECTORS 配置
参数详细解释:
文件系统镜像名字:
Name这里默认是
userfs1,可根据实际情况修改,如 user文件系统类型: FS Type
- 如果是 EMMC, 则请选择 EXT4
- 如果是 NAND,则请选择 UBIFS
- 如果是 NOR,则可以选择 UBIFS、JFFS2、SQUASHFS
-
Image 大小: ubifs size
- Image 的大小要小于等于分区的大小,不能超过
- 单位为 Byte, 默认 0x1 000 000 为 1M, 0x10 000 000 则为 16MB
- 设置时需要对齐为 MB
-
压缩算法
- 压缩算法的引进将减少 Image 的 Size,但读写速度变慢
- UBIFS 内部压缩算法 和 Image 两中压缩算法设计
- 建议不进�行压缩设置
4.2. 文件的安装
此处勾选了 UserFS 1 之后,编译时,SDK 会自动创建一个文件安装目录:
output/userfs/fs1.<fs_name>/
比如 fs_name = "User",则路径为:
output/userfs/fs1.User/
如果在编译 SDK 的组件包过程中,需要安装文件到该路面,可通过 Makefile 变量:
$(TARGET_USERFS1_DIR)
可得到该安装目录的路径。
小技巧
UserFS 2, UserFS 3 也是同样的配置。
4.3. UserFS Overlay
UserFS 同样支持 Overlay 的操作。Overlay 的目录在 RootFS 中的 Overlay directory 中配置。如果需要配置多个 Overlay 目录,则在不同的目录之间, 使用空格进行分开。
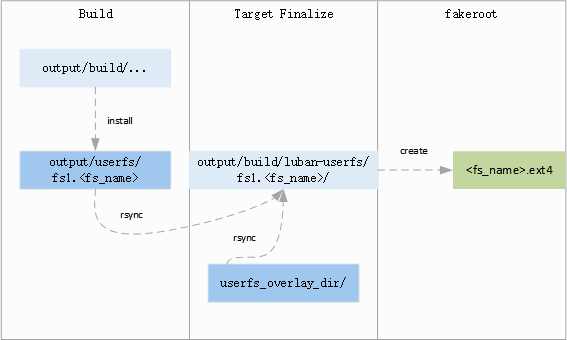
图 5.23 UserFS Overlay 示例
5. 分区修改
Luban 系统里,存储大小关联到两个概念,如果要修改存储大小,则需要进行两处参数的改动
- 分区大小:存储介质上的物理大小
- 镜像大小:打包的文件系统镜像的大小
警告
原则上,镜像大小必须等于分区大小
5.1. 配置分区
分区的大小配置,在 image_cfg.json 文件中完成, 以 rootfs 为例,修改为64MB
"mmc": { // Media type
"size": "8G", // Size of SD/eMMC
"partitions": { // Partition table apply to device
"spl_1": { "offset": "0x4400", "size": "128k" },
"spl_2": { "size": "367k" },
"uboot": { "size": "1m" },
"env": { "size": "512k" },
"kernel": { "size": "16m" },
"rootfs": { "size": "64m" },
5.2. 配置镜像
镜像的大小配置通过 make menuconfig 进行配置,以 RootFS images 为例,修改为 64MB
make menuconfig
Filesystem images --->
RootFS images
......
(0x40000000) ubifs size(Should be aligned to MB) \\Image的大小,需要等于分区,单位为Byte
......
5.3. 无镜像分区
对于无镜像的 kernel, uboot, env 等分区,要修改其大小直接在 image_cfg.json 文件中修改即可