RTC 使用指南
1. 模块介绍
1.1. 术语定义
| 术语 | 定义 | 注释说明 |
|---|---|---|
| RTC | Real Time Clock | 实时时钟 |
1.2. 模块简介
RTC(Real Time Clock)模块用于日期时间的保存和更新,在无网络下为系统提供一份有效的日期和时间。通过备用电池��供电,在断电场景下也可以一直计数和保存时间,同时还有闹钟唤醒的功能。
- 以秒为单位,最大支持100年跨度
- 精度取决于晶振精度。RTC V1.0支持校准,校准范围±975ppm(每百万次计数的误差)
- 支持一路闹钟设置(可通过软件来扩展成多路闹钟),闹钟精确到秒
- 闹钟支持输出一个中断信号(该信号也可以用于32K时钟输出)给外部系统
- RTC V1.0支持128bit 的系统数据备份,可用于掉电场景的数据保护
1.2.1. 低功耗设计
RTC V1.0控制器为了低功耗设计,选用8bit APB总线作为数据总线,带来的影响是相关的寄存器都是8bit格式。
- 如果要设置一个32bit的秒数,就需要将其拆分成4个8bit写入4个寄存器;
- 如果是读取秒数,就需要从4个寄存器的值组合成一个32bit数。
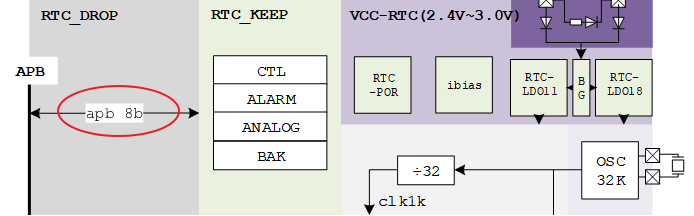
图 4.9 RTC 模块的硬件原理框图
2. 参数配置
2.1. 内核配置
在luban根目录下执行 make kernel-menuconfig,进入kernel的功能配置,按如下选择��:
Linux
Device Drivers
[*] Real Time Clock
[*] Artinchip Soc RTC
2.2. DTS 参数配置
2.2.1. RTC 自定义参数
RTC驱动支持从DTS中配置的自定义参数,如下表:
| 参数名称 | 适用版本 | 类型 | 取值范围 | 功能说明 |
|---|---|---|---|---|
| aic,alarm-io-output | V0.1/V1.0 | boolean | 有 - 1,无 - 0 | 是否使能Alarm的IO输出功能 |
| aic,32k-io-output | V1.0 | boolean | 有 - 1,无 - 0 | 是否使能32K时钟输出功能 |
| clock-rate | V1.0 | 正整数 | 3276800±3196 | 时钟源的实测频率值*100,用于时钟校准 |
| aic,clock-driver | V1.0 | 正整数 | [0, 15] | clock驱动能力,数值越小越省功耗 |
注解
- 参数
aic,clock-driver的值,需要通过一个 Sysfs 节点 驱动能力扫描 来扫描得到。 - 参数
aic,alarm-io-output和aic,32k-io-output共用一个IO输出,所以只能二选一。 clock-rate取时钟源频率值的 100倍,是为了提高校准的精度,校准可以精确到0.03Hz。
2.2.2. D211 配置
common/d211.dtsi中的参数配置:
rtc: rtc@19030000 {
compatible = "artinchip,aic-rtc-v1.0";
reg = <0x0 0x19030000 0x0 0x1000>;
interrupts-extended = <&plic0 50 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cmu CLK_RTC>;
resets = <&rst RESET_RTC>;
};
xxx/board.dts中的参数配置:
&rtc {
aic,alarm-io-output;
clock-rate = <3276851>;
aic,clock-driver = <13>;
status = "okay";
};
2.3. 时区配置
luban SDK中默认配置时区为 Asia/Shanghai,即中国的 +8 时区。 在luban根目录下执行 make menuconfig,进入功能配置:
System configuration
(Asia/Shanghai) default local time
有没有时区配置,可以通过shell命令 date 的输出信息判断,有 “UTC” 字样表示未配置时区,有 “CST” 字样表示已经配置了 +8 时区。
# date
Tue Jan 6 01:41:27 UTC 1970 - 未配置时区
# date
Tue Jan 6 01:41:27 CST 1970 - 已配置 +8 时区
未配置时区的时候,RTC 时间 和 系统时间(date命令的输出)是一致的;增加了时区配置后,两个会有一个时区差,关系:
系统时间 = RTC 时间 + 时区
以 +8 时区为例,可以通过 hwclock 命令 看到这个差别:
# date - 系统时间
Tue Jan 6 01:49:53 CST 1970
# hwclock - 原始的RTC时间
Mon Jan 5 17:49:17 1970 0.000000 seconds
# hwclock -u - RTC时间 + 时区,和系统时间一致
Tue Jan 6 01:49:20 1970 0.000000 seconds
注解
在打开时区的情况下,从 系统时间同步到RTC时间 的设置命令用 hwclock -wu,查看RTC时间的方式也应该加参数 -u (告诉hwclock工具RTC中保存的是UTC时间)。
3. 调试指南
3.1. 调试开关
在luban根目录下执行 make kernel-menuconfig,进入kernel的功能配置,可以打开RTC模块的DEBUG选项:
Linux
Kernel hacking
Artinchip Debug
[*] RTC driver debug
此DEBUG选项打开的影响:
- RTC驱动以-O0编译
- RTC的pr_dbg()和dev_dbg()调试信息会被编译
在系统运行时,如果要打印pr_dbg()和dev_dbg()信息,还需要调整loglevel为8,两个方法:
- 在board.dts中修改bootargs,增加“loglevel=8”
- 在板子启动到Linux shell后,执行命令:
echo 8 > /proc/sys/kernel/printk
3.2. Sysfs 节点
3.2.1. 状态信息
Linux内核原生提供一些 RTC 的 Sysfs 节点,可以用来获取(只读)时间、范围等信息:
# ls /sys/class/rtc/rtc0/
date hctosys range time
dev max_user_freq since_epoch uevent
device name subsystem
# cat /sys/class/rtc/rtc0/time
00:00:00
# cat /sys/class/rtc/rtc0/date
1970-01-01
在RTC驱动初始化成功后,会在Sysfs中注册生成一个 status 节点,其中打印了当前的RTC配置及状态信息:
[aic@] # cd /sys/devices/platform/soc/19030000.rtc/
[aic@19030000.rtc] # cat status
In RTC V1.00:
Module Enable: 1
Alarm Enable: 0, Output alarm IO: 2/1, Output 32K: 0
Clock rate: 32787, Driver: 13
Calibration Slow, Value: -608
3.2.2. 驱动能力扫描
RTC V1.0为了节省功耗,可以调低32K时钟的驱动能力,驱动力范围是 [0, 15],值越大功耗越大。
RTC驱动提供了一个Sysfs节点 driver_capability,用来给客户方便扫描出最适合的驱动力值。在RTC驱动初始化成功后,可以在其Sysfs目录,找到此节点,执行cat命令可触发扫描:
[aic@] # cd /sys/devices/platform/soc/19030000.rtc/
[aic@19030000.rtc] # cat driver_capability
[ 95.755513] 32K-clk driver 0 is OK
[ 97.835482] 32K-clk driver 1 is OK
[ 99.915447] 32K-clk driver 2 is OK
[ 101.995471] 32K-clk driver 3 is OK
[ 104.075494] 32K-clk driver 4 is OK
[ 106.155478] 32K-clk driver 5 is OK
[ 108.235529] 32K-clk driver 6 is OK
[ 110.315497] 32K-clk driver 7 is OK
[ 112.395507] 32K-clk driver 8 is OK
[ 114.475539] 32K-clk driver 9 is OK
[ 116.555492] 32K-clk driver 10 is OK
[ 118.635732] 32K-clk driver 11 is OK
[ 120.715503] 32K-clk driver 12 is OK
[ 122.795466] 32K-clk driver 13 is OK
[ 124.875483] 32K-clk driver 14 is OK
[ 126.955511] 32K-clk driver 15 is OK
The status of RTC driver:
Driver 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Status OK OK OK OK OK OK OK OK OK OK OK OK OK OK OK OK
客户可以从扫描结果中标注 “OK” 的值中选取一个配置到 :ref:`ref_to_rtc_dts` 。
小技巧
驱动力扫描的整个过程大约需要 16s。
3.3. hwclock 命令
busybox会带一个hwclock工具,可以用来读取、设置RTC时间。用法如下:
# hwclock -r —— 读取当前RTC时间(不加任何参数时就默认是读取)
Thu Jan 1 00:00:00 1970 0.000000 seconds
# hwclock -ru —— 读取当前RTC时间,然后加上时区校准
# hwclock -w —— 将当前的系统时间同步设置到RTC
# hwclock -wu —— 将当前的系统时间减去时区值,然后同步设置到RTC
# hwclock -s —— 将RTC时间同步设置到系统时间
4. 测试指南
4.1. 测试环境
4.1.1. 硬件
- 开发板上安装有电池(用于给RTC供电)
4.1.2. 软件
- PC端的串口终端软件,用于PC和开发板进行串口通信
- Linux内核原生的rtctest工具
- AiTest测试框架,用于长时间的精度测试
4.1.3. 软件配置
4.1.3.1. rtctest
在luban的根目录下通过make menuconfig可以打开rtctest:
Linux kernel
Advance setting
Linux Kernel Tools
[*] selftests
4.2. rtctest 测试
rtctest的主要功能是测试RTC的Alarm功能,板子上的rtctest位于 /usr/lib/kselftests/rtc/,进入该目录,直接运行rtctest即可:
[aic@] # cd /usr/lib/kselftests/rtc/
[aic@rtc] # ./rtctest
TAP version 13
1..7
# Starting 7 tests from 2 test cases.
# RUN rtc.date_read ...
# rtctest.c:49:date_read:Current RTC date/time is 05/01/1970 21:50:57.
# OK rtc.date_read
ok 1 rtc.date_read
# RUN rtc.uie_read ...
# OK rtc.uie_read
ok 2 rtc.uie_read
# RUN rtc.uie_select ...
# OK rtc.uie_select
ok 3 rtc.uie_select
# RUN rtc.alarm_alm_set ...
# rtctest.c:137:alarm_alm_set:Alarm time now set to 21:51:06.
# rtctest.c:156:alarm_alm_set:data: 1a0
# OK rtc.alarm_alm_set
ok 4 rtc.alarm_alm_set
# RUN rtc.alarm_wkalm_set ...
# rtctest.c:195:alarm_wkalm_set:Alarm time now set to 05/01/1970 21:51:09.
# OK rtc.alarm_wkalm_set
ok 5 rtc.alarm_wkalm_set
# RUN rtc.alarm_alm_set_minute ...
# rtctest.c:239:alarm_alm_set_minute:Alarm time now set to 21:52:00.
# rtctest.c:258:alarm_alm_set_minute:data: 1a0
# OK rtc.alarm_alm_set_minute
ok 6 rtc.alarm_alm_set_minute
# RUN rtc.alarm_wkalm_set_minute ...
# rtctest.c:297:alarm_wkalm_set_minute:Alarm time now set to 05/01/1970 21:53:00.
# OK rtc.alarm_wkalm_set_minute
ok 7 rtc.alarm_wkalm_set_minute
# PASSED: 7 / 7 tests passed.
# Totals: pass:7 fail:0 xfail:0 xpass:0 skip:0 error:0
4.3. RTC 精度测试
测试过程需要用一个脚本来完成测试,测试步骤是:
- 将PC的本地时间同步到板子上;
- 每隔100秒去检查下板子上的RTC时间,和PC时间比较,计算一个百万秒的精度值;
- 重复步骤2,直到完成1百万秒的测试。
以下是测试用例的主干代码,详见AiTest/testcase/rtc/test_mod_rtc_precision.py
def test_case_rtc_precision(self):
self.assertTrue(self.detectLinux())
self.sync_localtime_to_target()
loop = int(self.mega / self.delay)
loop = 100 * int((loop + 99) / 100)
self.logger.info(f'Do {loop} loops, {self.delay} sec each loop\n')
for i in range(0, loop):
self.logger.info(f"{i}/{loop}. Sleep {self.delay} sec ...")
time.sleep(self.delay)
self.check_current_time()
5. 设计说明
5.1. 源码说明
源代码位于:
- RTC V1.0: drivers/rtc/artinchip-rtc.c
- RTC V0.1: drivers/rtc/artinchip-rtc-v0.1.c
5.2. 模块架构
Linux提供了一个RTC子系统(简称RTC Core),使得在用户空间可以通过/dev/watchdogX来访问Watchdog控制器。为了更方便查看硬件状态和参数设置,本驱动另外扩展了几个sysfs节点。 整个软件框架可以简单抽象为下图:
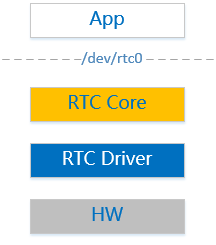
图 4.10 Linux RTC子系统架构图
RTC V1.0控制器可以适配到Linux标准的时间、闹钟接口,其他非标准的特性有:
-
Alarm的中断输出:
是否有输出完全由板级电路的设计决定,软件上只需要使能中断信号即可。在DTS中提供了一个bool类型的参数方便用户配置“alarm-io-output”。
-
校准参数:
控制器支持±975ppm的校准范围,用户需要配置DTS中的参数
clock-rate详见 RTC 自定义参数。 -
精准驱动能力
为了节省功耗,可以降低32K时钟的驱动能力到刚好够用,扫描方法见 驱动能力扫描
-
8bit寄存器的读写
在驱动设计时将8bit数据的拆解、打包进行封装,可以尽量减少对代码的干扰,封装如下:
#define RTC_WRITEL(val, reg) \
do { \
writeb((val) & 0xFF, (reg)); \
writeb(((val) >> 8) & 0xFF, (reg) + 0x4); \
writeb(((val) >> 16) & 0xFF, (reg) + 0x8); \
writeb(((val) >> 24) & 0xFF, (reg) + 0xC); \
} while (0)
#define RTC_READL(reg) (readb(reg) | (readb((reg) + 0x4) << 8) \
| (readb((reg) + 0x8) << 16) \
| (readb((reg) + 0xC) << 24))
5.3. 关键流程设计
5.3.1. 初始化流程
RTC驱动的初始化过程见aic_rtc_probe()函数,除了普通platform设备的处理过程(申请regs资源、clk、reset)外,需要调用RTC子系统的接口rtc_register_device()来注册RTC设备。
#define rtc_register_device(device) __rtc_register_device(THIS_MODULE, device)
其中参数struct rtc_device device中关键信息有:最大值、ops等,aic_rtc_ops定义如下:
static const struct rtc_class_ops aic_rtc_ops = {
.read_time = aic_rtc_read_time,
.set_time = aic_rtc_set_time,
.read_alarm = aic_rtc_read_alarm,
.set_alarm = aic_rtc_set_alarm,
.alarm_irq_enable = aic_rtc_alarm_irq_enable,
};
5.3.2. 校准算法设计
校准的算法原理是,将输入的 32KHz 晶振时钟校准到理想的 32KHz,公式如下:
(100 * 1024 * 1024 + 100 * calibrate) / (clock-rate / 32) = 1024
=> calibrate = (clock-rate * 32 - 100 * 1024 * 1024) / 100;
其中:
- clock-rate: 是用户实测 32K晶振的频率值 * 100,需要配置在DTS中,详见 RTC 自定义参数
- calibrate: 最终要填入RTC控制器的校准值
注解
校准值calibrate分正负,正 - 表示32K晶振实际偏快了,负 - 表示32K晶振偏慢了。
5.3.3. 系统状态的备份功能
RTC控制器提供了 128bit 的备份寄存器 SYS_BAK,用于掉电时一些重要状态或者参数的保存。RTC驱动将这几个寄存器封装为对外接口( EXPORT_SYMBOL_GPL() 的形式),Linux中其他驱动都可以调用。
5.3.4. Reboot Reason 的设计
将上节中 系统备份寄存器 保存不同情况的Reboot reason,可用于分析终端运行稳定性问题、进入快速启动模式等场景。
SYS_BAK 寄存器需要和 WRI 模块一起配合来完成Boot reason的处理:
-
WRI
负责记录 硬件可监测 到的Reboot原因,如过温保护、看门狗复位、外部输入复位等;
-
SYS_BAK
负责记录 软件可监测 到的Reboot原因,如Suspend、Panic、进入烧写模式、正常重启等。
关于Reboot原因,梳理分类如下:

图 4.11 各种情况的Reboot reason梳理
小技巧
其中“外部IO复位”指常用的Reset按键。
所以,定义 SYS_BAK0寄存器(4~7bit) 的值如下:(详见include/linux/reboot-reason.h)
enum aic_reboot_reason {
REBOOT_REASON_COLD = 0,
REBOOT_REASON_CMD_REBOOT = 1,
REBOOT_REASON_CMD_SHUTDOWN = 2,
REBOOT_REASON_SUSPEND = 3,
REBOOT_REASON_UPGRADE = 4,
REBOOT_REASON_FASTBOOT = 5,
/* Some software exception reason */
REBOOT_REASON_SW_LOCKUP = 8,
REBOOT_REASON_HW_LOCKUP = 9,
REBOOT_REASON_PANIC = 10,
REBOOT_REASON_RAMDUMP = 11,
};
针对不同场景,SYS_BAK0寄存器中的Reboot reason 和 WRI中的RST_FLAG值对应如下:

注解
其中“按Reset按键”的情况,因为软件来不及设置SYS_BAK,所以是初始值0 (COLD)。
5.4. 数据结构设计
5.4.1. aic_rtc_dev
记录RTC控制器的配置信息:
struct aic_rtc_dev {
void __iomem *base;
struct rtc_device *rtc_dev;
struct attribute_group attrs;
struct clk *clk;
u32 clk_rate;
u32 clk_drv;
bool alarm_io;
bool cal_fast;
s32 cal_val;
struct completion complete;
};
5.5. 接口设计
以下接口是 Linux RTC 子系统需要的标准接口。
5.5.1. 外部接口
5.5.1.1. ioctl 接口
Linux对用户态提供了一组RTC的ioctl接口,用户态可以通过设备节点/dev/rtc0来访问:(详见include/upai/linux/rtc.h)
#define RTC_AIE_ON _IO('p', 0x01) /* Alarm int. enable on */
#define RTC_AIE_OFF _IO('p', 0x02) /* ... off */
#define RTC_UIE_ON _IO('p', 0x03) /* Update int. enable on */
#define RTC_UIE_OFF _IO('p', 0x04) /* ... off */
#define RTC_PIE_ON _IO('p', 0x05) /* Periodic int. enable on */
#define RTC_PIE_OFF _IO('p', 0x06) /* ... off */
#define RTC_WIE_ON _IO('p', 0x0f) /* Watchdog int. enable on */
#define RTC_WIE_OFF _IO('p', 0x10) /* ... off */
#define RTC_ALM_SET _IOW('p', 0x07, struct rtc_time) /* Set alarm time */
#define RTC_ALM_READ _IOR('p', 0x08, struct rtc_time) /* Read alarm time */
#define RTC_RD_TIME _IOR('p', 0x09, struct rtc_time) /* Read RTC time */
#define RTC_SET_TIME _IOW('p', 0x0a, struct rtc_time) /* Set RTC time */
#define RTC_IRQP_READ _IOR('p', 0x0b, unsigned long) /* Read IRQ rate */
#define RTC_IRQP_SET _IOW('p', 0x0c, unsigned long) /* Set IRQ rate */
#define RTC_EPOCH_READ _IOR('p', 0x0d, unsigned long) /* Read epoch */
#define RTC_EPOCH_SET _IOW('p', 0x0e, unsigned long) /* Set epoch */
#define RTC_WKALM_SET _IOW('p', 0x0f, struct rtc_wkalrm)/* Set wakeup alarm*/
#define RTC_WKALM_RD _IOR('p', 0x10, struct rtc_wkalrm)/* Get wakeup alarm*/
#define RTC_PLL_GET _IOR('p', 0x11, struct rtc_pll_info) /* Get PLL correction */
#define RTC_PLL_SET _IOW('p', 0x12, struct rtc_pll_info) /* Set PLL correction */
Demo 就是调用的这些接口完成alarm配置,以及hwclock工具也是调用上述接口。
5.5.2. RTC 相关的内部接口
5.5.2.1. aic_rtc_read_time
| 函数原型 | static int aic_rtc_read_time(struct device *dev, struct rtc_time *tm) |
|---|---|
| 功能说明 | 读取当前的RTC时间 |
| 参数定义 | dev - 指向RTC设备的指针tm - 用于存放获取到的时间信息 |
| 返回值 | 0,成功 |
| 注意事项 |
5.5.2.2. aic_rtc_set_time
| 函数原型 | static int aic_rtc_set_time(struct device *dev, struct rtc_time *tm) |
|---|---|
| 功能说明 | 设置RTC时间 |
| 参数定义 | dev - 指向RTC设备的指针tm - 需要设置的时间信息 |
| 返回值 | 0,成功 |
| 注意事项 | 更新RTC控制器的秒数,需要先暂停RTC计数,设置完秒数,再使能RTC。 |
5.5.2.3. aic_rtc_read_alarm
| 函数原型 | static int aic_rtc_read_alarm(struct device *dev, struct rtc_wkalrm *alarm) |
|---|---|
| 功能说明 | 读取当前的Alarm状态信息 |
| 参数定义 | dev - 指向RTC设备的指针alarm - 用于保存读取到的当前Alarm信息,包括下一次超时时间和超时状态 |
| 返回值 | 0,成功 |
| 注意事项 |
5.5.2.4. aic_rtc_set_alarm
| 函数原型 | static int aic_rtc_set_alarm(struct device *dev, struct rtc_wkalrm *alarm) |
|---|---|
| 功能说明 | 设置一个Alarm,并使能Alarm中断 |
| 参数定义 | dev - 指向RTC设备的指针alarm - 需要设置的Alarm信息 |
| 返回值 | 0,成功 |
| 注意事项 |
5.5.2.5. aic_rtc_alarm_irq_enable
| 函数原型 | static int aic_rtc_alarm_irq_enable(struct device *dev, unsigned int enabled) |
|---|---|
| 功能说明 | 开关Alarm中断 |
| 参数定义 | dev - 指向RTC设备的指针enabled - 使能标记 |
| 返回值 | 0,成功 |
| 注意事项 |
5.5.3. 系统状态备份相关的内部接口
5.5.3.1. aic_rtc_set_bak
| 函数原型 | void aic_rtc_set_bak(u32 offset, u32 mask, u32 shift, u32 val) |
|---|---|
| 功能说明 | 设置SYS_BAK寄存器中某几个(连续的)bit |
| 参数定义 | offset - 寄存器的偏移地址,取值范围:0、4、8、12mask - 待设置的bit掩码shift - 待设置的bit需要左移多少位val - 待设置的实际值 |
| 返回值 | 无 |
| 注意事项 | 设置过程:先将val左移,然后再做掩码处理 |
5.5.3.2. aic_rtc_get_bak
| 函数原型 | u32 aic_rtc_get_bak(u32 offset, u32 mask, u32 shift) |
|---|---|
| 功能说明 | 读取SYS_BAK寄存器中某几个(连续的)bit |
| 参数定义 | offset - 寄存器的偏移地址,取值范围:0、4、8、12mask - 待读取的bit掩码shift - 待读取的bit需要右移多少位 |
| 返回值 | 实际读取到的寄存器值 |
| 注意事项 | 读取过程:先将读取到的寄存器当前值做掩码处理,然后再右移 |
5.5.3.3. aic_set_software_reboot_reason
| 函数原型 | void aic_set_software_reboot_reason(enum aic_reboot_reason reason) |
|---|---|
| 功能说明 | 设置Reboot reason到SYS_BAK寄存器 |
| 参数定义 | reason - aic_reboot_reason类型的启动原因 |
| 返回值 | 无 |
| 注意事项 | aic_reboot_reason 详见 Reboot Reason 的设计 |
5.5.3.4. aic_get_software_reboot_reason
| 函数原型 | enum aic_reboot_reason aic_get_software_reboot_reason(void) |
|---|---|
| 功能说明 | 从SYS_BAK寄存器中读取上一次系统的Reboot reason类型 |
| 参数定义 | 无 |
| 返回值 | aic_reboot_reason类型的启动原因 |
| 注意事项 | aic_reboot_reason 详见 Reboot Reason 的设计 |
5.6. Demo
本Demo是通过ioctl接口来访问设备节点/dev/rtc0:
#include "base.h"
#include <sys/time.h>
#include <linux/rtc.h>
/* Global macro and variables */
#define ALARM_MAX_DELAY (60 * 60)
#define ALARM_MIN_DELAY 1
static const char sopts[] = "d:u";
static const struct option lopts[] = {
{"delay", required_argument, NULL, 'd'},
{"usage", no_argument, NULL, 'u'},
{0, 0, 0, 0}
};
/* Functions */
void usage(char *program)
{
printf("Usage: %s will start a timer of given seconds, and wait it\n",
program);
printf("\t -d, --delay\trange: [%d, %d]\n", ALARM_MIN_DELAY,
ALARM_MAX_DELAY);
printf("\t -u, --usage \n");
printf("\n");
printf("Example: %s -d 12\n\n", program);
}
/* Open a device file to be needed. */
int device_open(char *_fname, int _flag)
{
s32 fd = -1;
fd = open(_fname, _flag);
if (fd < 0) {
ERR("Failed to open %s errno: %d[%s]\n",
_fname, errno, strerror(errno));
exit(0);
}
return fd;
}
int main(int argc, char **argv)
{
int c, ret;
int delay = 0;
int rtc_fd = -1;
time_t tmp = 0;
struct rtc_time start = {0};
struct rtc_time end = {0};
struct rtc_wkalrm alrm_set = {0};
struct rtc_wkalrm alrm_get = {0};
DBG("Compile time: %s\n", __TIME__);
while ((c = getopt_long(argc, argv, sopts, lopts, NULL)) != -1) {
switch (c) {
case 'd':
delay = str2int(optarg);
continue;
case 'u':
usage(argv[0]);
return 0;
default:
break;
}
}
if ((delay < ALARM_MIN_DELAY) || (delay > ALARM_MAX_DELAY)) {
ERR("Invalid delay: %d\n", delay);
return -1;
}
rtc_fd = open("/dev/rtc0", O_RDWR);
if (rtc_fd < 0) {
ERR("Failed to open RTC device!\n");
return -1;
}
DBG("ioctl(%#x)\n", RTC_RD_TIME);
ret = ioctl(rtc_fd, RTC_RD_TIME, &start);
if (ret < 0) {
ERR("Failed to read RTC time!\n");
goto err;
}
DBG("Current time: %04d-%02d-%02d %02d:%02d:%02d\n",
start.tm_year, start.tm_mon, start.tm_mday,
start.tm_hour, start.tm_min, start.tm_sec);
alrm_set.enabled = 1;
tmp = mktime((struct tm *)&start) + delay;
memcpy(&alrm_set.time, gmtime(&tmp), sizeof(struct rtc_time));
DBG("ioctl(%#x)\n", RTC_WKALM_SET);
ret = ioctl(rtc_fd, RTC_WKALM_SET, &alrm_set);
if (ret < 0) {
ERR("Failed to set alarm! [%d]: %s\n", errno, strerror(errno));
goto err;
}
DBG("Set a alarm to: %04d-%02d-%02d %02d:%02d:%02d\n",
alrm_set.time.tm_year, alrm_set.time.tm_mon,
alrm_set.time.tm_mday, alrm_set.time.tm_hour,
alrm_set.time.tm_min, alrm_set.time.tm_sec);
do {
memset(&alrm_get, 0, sizeof(struct rtc_wkalrm));
DBG("ioctl(%#x)\n", RTC_WKALM_RD);
ret = ioctl(rtc_fd, RTC_WKALM_RD, &alrm_get);
if (ret < 0) {
ERR("Failed to read alarm!\n");
goto err;
}
if (alrm_get.pending)
break;
printf("Waiting ...\n");
usleep(200000); // 200ms
} while (1);
DBG("ioctl(%#x)\n", RTC_RD_TIME);
ret = ioctl(rtc_fd, RTC_RD_TIME, &end);
if (ret < 0) {
ERR("Failed to read RTC time!\n");
goto err;
}
DBG("Current time: %04d-%02d-%02d %02d:%02d:%02d\n",
end.tm_year, end.tm_mon, end.tm_mday,
end.tm_hour, end.tm_min, end.tm_sec);
tmp = mktime((struct tm *)&end) - mktime((struct tm *)&start);
DBG("Start a timer of %d, actualy is %ld ...\n", delay, tmp);
if (ret != delay) {
ERR("The timer is not accurate!\n");
ret = -1;
}
else {
DBG("The timer is good!\n");
ret = 0;
}
err:
if (rtc_fd > 0)
close(rtc_fd);
return ret;
}
6. 常见问题
6.1. RTC 时间丢失
6.1.1. 现象
重启后,RTC时间变成 1970-01-01 00:00:00
6.1.2. 原因分析
RTC 需要持续的供电,才能保持住配置的时间信息。所以:
- 确认电源线是否有断开过
- 确认是否安装有电池
- 电池电量是否充足
6.2. RTC 时间有误差
6.2.1. 现象
RTC模块的设计精度是 2秒/3天。 给RTC带电的情况,长时间运行,如果发现超出这个误差值,说明RTC时间的误差需要校准了。