SPI 使用指南
1. 模块介绍
1.1. 术语定义
| 术语 | 定义 | 注释说明 |
|---|---|---|
| SPI | Serial Peripheral Interface | 串行外设接口 |
| Dual SPI | Dual Serial Peripheral Interface | 双路 SPI |
| Quad SPI | Quad Serial Peripheral Interface | 四路 SPI,又称 QSPI |
| CPOL | Clock polarity | 时钟极性 |
| CPHA | Clock phase | 时钟相位 |
1.2. 模块简介
SPI (Serial Peripheral Interface) 最初是 Motorola 提出的4线同步串行数据传输接口, 是一种高速、全双工的同步通信总线。由于其实现比较简单,没有专利限制等,因此在各种器件中得到广泛的应用。 SPI 总线是一种行业事实标准,并没有统一的标准化组织,不同厂商在实际应用中演化出多种工作模式。
SPI 总线接口的应用领域:
- 存储设备:Flash、SD、MMC、EEPROM 等
- 传感器:温度传感器、压力传感器等
- ADC/DAC
- Audio Codec
- LCD 显示屏幕
- 触摸屏幕
- RTC
- 数字电位计
- 游戏控制器等
Artinchip SPI 支持:
- 全双工、半双工模式
- DMA 读写模式
- CPU 读写模式
- 最高工作频率 100MHz
- 支持四线制模式:标准4线 SPI、DUAL SPI、QUAD SPI
- 支持三线制模式
- 数据位传输的模式可配置,CPOL 和 CPHA
1.2.1. 标准4线 SPI
这是一种四线制的 SPI 连接和工作模式。
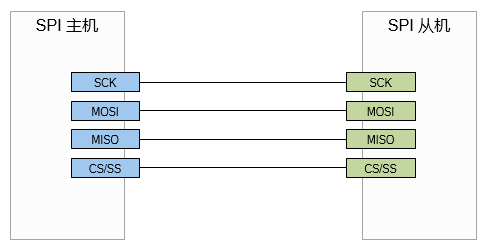
图 7.35 四线制标准 SPI
1.2.2. DUAL SPI
主机端的 MISO 为 SIO0, MOSI 为 SIO1,常用于 SPI Flash。
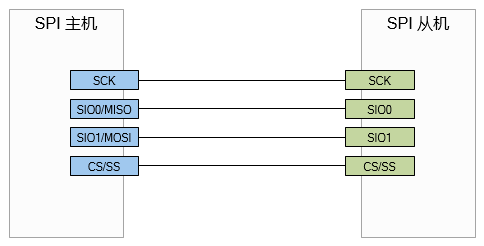
图 7.36 四线制 DUAL SPI
1.2.3. QUAD SPI
主机端的 MOSI 为 IO0, MISO 为 IO1, WP 为 IO2, HOLD 为 IO3,常用于 SPI Flash。
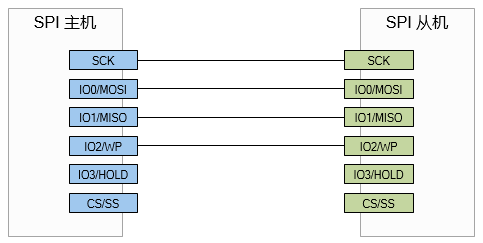
图 7.37 四线制 QUAD SPI
1.2.4. 三线制 SPI
三线制 SPI 常用于工业控制类场景。这种接线方式,主机端使用 MOSI 作为 DIO。
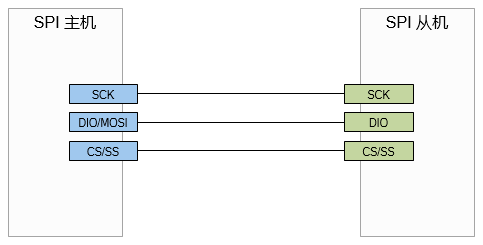
图 7.38 三线制 SPI
1.2.5. CPOL 与 CPHA
CPHA 是时钟相位,CPOL 是时钟极性,两者的不同组合是 SPI 数据传输的不同模式。
| CPHA | 说明 |
|---|---|
| 0 | 数据采样在第1个边沿,数据发送在第2个边沿 |
| 1 | 数据采样在第2个边沿,数据发送在第1个边沿 |
| CPOL | 说明 |
|---|---|
| 0 | 空闲状态时,SCK 为低电平 |
| 1 | 空闲状态时,SCK 为高电平 |
| Mode | 值 | 说明 |
|---|---|---|
| 0 | CPOL=0, CPHA=0 | 空闲时,SCK 处于低电平数据采样在上升沿,下降沿保持 |
| 1 | CPOL=0, CPHA=1 | 空闲时,SCK 处于高电平数据采样在下降沿,上升沿保持 |
| 2 | CPOL=1, CPHA=0 | 空闲时,SCK 处于低电平数据采样在下降沿,上升沿保持 |
| 3 | CPOL=1, CPHA=1 | 空闲时,SCK 处于高电平数据采样在上升沿,下降沿保持 |
2. 参数配置
2.1. 内核配置
使能 SPI 相关的内核驱动,可在通过下列命令进行配置(在 SDK 顶层目录执行):
make linux-menuconfig
在内核的配置界面中,进行下列的选择:
Device Drivers --->
[*] SPI support --->
<*> Artinchip SPI controller
......
[*] DMA Engine support --->
<*> Artinchip SoCs DMA support
进行如上的配置之后,内核 SPI 驱动使能,并且 SPI 可使用 DMA 进行数据传输。
2.2. DTS 配置
芯片级的 DTS:
spi0: spi@10400000 {
compatible = "artinchip,aic-spi-v1.0";
reg = <0x0 0x10400000 0x0 0x1000>;
interrupts-extended = <&plic0 44 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cmu CLK_SPI0>;
resets = <&rst RESET_SPI0>;
dmas = <&dma DMA_SPI0>, <&dma DMA_SPI0>;
dma-names = "rx", "tx";
#address-cells = <1>;
#size-cells = <0>;
spi-max-frequency = <24000000>;
};
spi1: spi@10410000 {
compatible = "artinchip,aic-spi-v1.0";
reg = <0x0 0x10410000 0x0 0x1000>;
interrupts-extended = <&plic0 45 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cmu CLK_SPI1>;
resets = <&rst RESET_SPI1>;
dmas = <&dma DMA_SPI1>, <&dma DMA_SPI1>;
dma-names = "rx", "tx";
#address-cells = <1>;
#size-cells = <0>;
spi-max-frequency = <24000000>;
};
其中板级的配置 board.dts 中需要使能该模块,并且根据实际情况,配置最大工作频率:
&spi0 {
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins_a>;
spi-max-frequency = <100000000>;
status = "okay";
};
&spi1 {
pinctrl-names = "default";
pinctrl-0 = <&spi1_pins_a>;
spi-max-frequency = <100000000>;
status = "okay";
};
board-u-boot.dtsi 需要设置 u-boot,dm-pre-reloc ,只有设置了该标记,SPL 中才可以使用 SPI:
&spi0 {
u-boot,dm-pre-reloc;
};
&spi1 {
u-boot,dm-pre-reloc;
};
3. 调试指南
3.1. 调试开关
可通过内核配置使能 SPI 模块的 DEBUG 选项。在 SDK 根目录下执行:
make linux-menuconfig (or make km)
进入内核的配置界面:
Linux
Kernel hacking
Artinchip Debug
[*] SPI driver debug
勾选使能该 DEBUG 选项后:
- SPI �的驱动源码将以
-O0编译- SPI 驱动中的 pr_dbg() 和 dev_dbg() 调试信息会被编译
如果需要看到 pr_dbg() 和 dev_dbg() 的打印信息,还需要设置 loglevel=8 。
若需要在启动过程中即可看到打印,需要在 env.txt 中修改 bootargs,增加 loglevel=8 。 若仅需要在板子启动到 Linux shell 后使能相关打印,可以通过下列命令调整 loglevel:
echo 8 > /proc/sys/kernel/printk
4. 测试指南
5. 设计说明
5.1. 源码说明
| 相关模块 | 源码路径 |
|---|---|
| SPI subsystem | source/linux-5.10/drivers/spi/ |
| Driver | source/linux-5.10/drivers/spi/ |
5.2. 模块架构
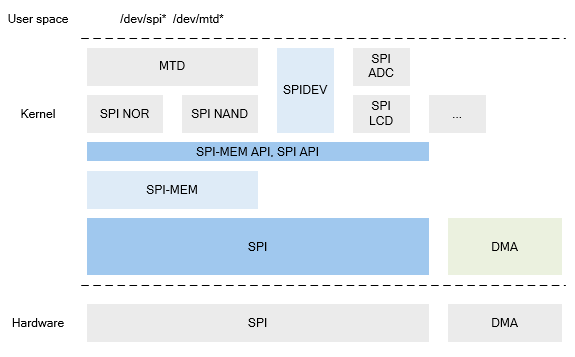
图 7.39 内核 SPI 框图
由于使用 SPI 的外设较多,内核中通过 SPI 子系统来支持各种 SPI 外设,整体架构如上图所示,包括:
- Artinchip SPI 驱动
- SPI Core
- SPI-MEM
- 面向内核的 API
- 面向用户空间的接口(SPIDEV)
由于 SPI 传输需要使用 DMA,因此 DMA 子系统是一个相关模块。
5.3. 关键流程
5.3.1. 初始化
aic_spi_probe();
|-> irq = platform_get_irq(pdev, 0);
|-> ctlr = spi_alloc_master(&pdev->dev, sizeof(struct aic_spi));
|-> platform_set_drvdata(pdev, ctlr);
|-> aicspi->dma_rx = dma_request_slave_channel(aicspi->dev, "rx");
|-> aicspi->dma_tx = dma_request_slave_channel(aicspi->dev, "tx");
|-> request_irq(aicspi->irq, aic_spi_handle_irq, 0, aicspi->dev_name, aicspi);
|-> spi_register_controller(ctlr);
5.3.2. 中断流程
SPI 控制器驱动中的中断处理并不复杂,当中断发生时,首先在 irq handler 中读取相关状态寄存器, 然后判断如何处理:
static irqreturn_t aic_spi_handle_irq(int irq, void *dev_id)
{
...
spi_ctlr_pending_irq_clr(status, base_addr);
/* master mode, Transfer Complete Interrupt */
if (status & ISR_BIT_TC) {
...
spi_ctlr_irq_disable(ISR_BIT_TC | ISR_BIT_ERRS, base_addr);
spi_finalize_current_transfer(aicspi->ctlr); // 传输完成,通知调用者
...
return IRQ_HANDLED;
} else if (status & ISR_BIT_ERRS) {
...
spi_ctlr_irq_disable(ISR_BIT_TC | ISR_BIT_ERRS, base_addr);
spi_ctlr_soft_reset(base_addr); // 传输出错,reset 控制器
spi_finalize_current_transfer(aicspi->ctlr);
...
return IRQ_HANDLED;
}
...
return IRQ_NONE;
}
5.4. 数据结构
enum spi_mode_type {
SINGLE_HALF_DUPLEX_RX,
SINGLE_HALF_DUPLEX_TX,
SINGLE_FULL_DUPLEX_RX_TX,
DUAL_HALF_DUPLEX_RX,
DUAL_HALF_DUPLEX_TX,
QUAD_HALF_DUPLEX_RX,
QUAD_HALF_DUPLEX_TX,
MODE_TYPE_NULL,
};
设备数据结构。
struct aic_spi {
struct device *dev; // 设备指针
struct spi_controller *ctlr; // SPI CORE 的控制器指针
void __iomem *base_addr; // 映射后的 SPI 控制器地址
struct clk *mclk; // SPI 控制器的时钟
struct reset_control *rst; // SPI 控制器的复位
struct dma_chan *dma_rx; // SPI 控制器的接收 DMA Channel
struct dma_chan *dma_tx; // SPI 控制器的发送 DMA Channel
dma_addr_t dma_addr_rx; // SPI 控制器 RX FIFO 地址
dma_addr_t dma_addr_tx; // SPI 控制器 TX FIFO 地址
enum spi_mode_type mode_type;
unsigned int irq; // 中断号
char dev_name[48];
spinlock_t lock;
};
5.5. 接口设计
5.5.1. aic_spi_setup
| 函数原型 | int aic_spi_setup(struct spi_device *spi) |
|---|---|
| 功能说明 | SPI 设备的传输位宽、模式的检查和配置 |
| 参数定义 | struct spi_device *spiSPI 设备指针 |
| 返回值 | 0: 成功其他: 失败 |
| 注意事项 |
5.5.2. aic_spi_set_cs
| 函数原型 | void aic_spi_set_cs(struct spi_device *spi, bool cs_high) |
|---|---|
| 功能说明 | 设置 SPI 设备的片选信号 |
| 参数定义 | struct spi_device *spiSPI 设备指针bool cs_high是否选择该设备 |
| 返回值 | 无 |
| 注意事项 |
5.5.3. aic_spi_max_transfer_size
| 函数原型 | size_t aic_spi_max_transfer_size(struct spi_device *spi) |
|---|---|
| 功能说明 | SPI CORE 获取当前 SPI 控制器单次最大可传输的数据长度 |
| 参数定义 | struct spi_device *spiSPI 设备指针 |
| 返回值 | 单次可传输的数据长度 |
| 注意事项 |
5.5.4. aic_spi_transfer_one
| 函数原型 | int aic_spi_transfer_one(struct spi_controller *ctlr,struct spi_device *spi, struct spi_transfer *t) |
|---|---|
| 功能说明 | 执行一次传输 |
| 参数定义 | struct spi_controller *ctlrSPI 控制器指针struct spi_device *spiSPI 设备指针struct spi_transfer *t单次 SPI 传输结构体指针 |
| 返回值 | 0: 成功其他: 失败 |
| 注意事项 |
6. 常见问题
6.1. 如何添加新的 SPI NAND 设备
6.1.1. 驱动层次关系
SPI NAND 属于 SPI 的从设备,在内核中相关驱动通过 SPI MEM 对接到 SPI 子系统,如 图 7.39 所示。 在 SPI 控制器初始化时,SPI 驱动会检查该控制器下是否有挂载的 SPI NAND,有则添加到 SPI BUS 中。
aic_spi_probe(dev);
|-> spi_register_controller(ctlr);/spi_register_master(ctlr);
| // spi_register_master 是一个宏
|
|-> of_register_spi_devices(ctlr);
|-> spi = of_register_spi_device(ctlr, nc);
|-> spi = spi_alloc_device(ctlr);
|-> of_spi_parse_dt(ctlr, spi, nc);
|-> rc = spi_add_device(spi);
// 将 SPI device 添加到 SPI 总线 spi_bus_type 中
在调用 spi_add_device 的过程中,会查找和匹配对应设备的驱动程序(如果这时候对 应的驱动程序还没有被添加到系统�中,则在这里先将设备添加到 Bus,等到对应驱动程序 被添加进来时,再进行匹配。)
| 模块 | 驱动源码路径 |
|---|---|
| SPI NAND | source/linux-5.10/drivers/mtd/nand/spi/ |
6.1.2. 检查和添加新设备
内核中所支持的 SPI NAND 设备通过两级列表进行设置。
首先检查 source/linux-5.10/drivers/mtd/nand/spi/core.c 中的 spinand_manufacturers, 查看新设备的厂商是否在列表之中:
static const struct spinand_manufacturer *spinand_manufacturers[] = {
&gigadevice_spinand_manufacturer,
¯onix_spinand_manufacturer,
µn_spinand_manufacturer,
¶gon_spinand_manufacturer,
&toshiba_spinand_manufacturer,
&winbond_spinand_manufacturer,
};
再检查具体的设备厂商文件,具体的型号是否在列表之中( 以gigadevice 为例):
static const struct spinand_info gigadevice_spinand_table[] = {
SPINAND_INFO("GD5F1GQ4UExxG",
SPINAND_ID(SPINAND_READID_METHOD_OPCODE_ADDR, 0xd1),
NAND_MEMORG(1, 2048, 128, 64, 1024, 20, 1, 1, 1),
NAND_ECCREQ(8, 512),
SPINAND_INFO_OP_VARIANTS(&read_cache_variants,
&write_cache_variants,
&update_cache_variants),
SPINAND_HAS_QE_BIT,
SPINAND_ECCINFO(&gd5fxgq4_variant2_ooblayout,
gd5fxgq4uexxg_ecc_get_status)),
......
};
此处检查,需要查找新设备的 Datasheet,找到该设备的 Device ID(可在 Datasheet 中直接搜索 “Device ID”)。 并查看该 Device ID 是否出现在列表中。例如此处 SPINAND_ID(SPINAND_READID_METHOD_OPCODE_ADDR, 0xd1), 的最后一个数值 0xd1 就是 一个 Device ID 值。
如果不存在,则参考上述例子,添加一个新的设备记录。
6.1.3. 修改 DTS
要在实际项目中使用 SPI NAND 设备,还需要修改 DTS 配置。
board.dts 应在具体的 SPI 控制器下添加 spi-nand 设备。
&spi1 {
pinctrl-names = "default";
pinctrl-0 = <&spi1_pins_a>;
status = "okay";
spi-max-frequency = <100000000>;
spi-flash@0 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "spi-nand";
spi-max-frequency = <100000000>;
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
reg = <0>;
status = "okay";
};
};
同时还需在 board-u-boot.dtsi 文件中,将该设备标记为 u-boot,dm-pre-reloc ,不然 SPL 无法识别和使用。
&spi1 {
u-boot,dm-pre-reloc;
spi-flash@0 {
u-boot,dm-pre-reloc;
};
};
6.2. 如何添加新的 SPI NOR 设备
6.2.1. 驱动层次关系
SPI NOR 属于 SPI 的从设备,在内核中相关驱动通过 SPI MEM 对接到 SPI 子系统,如 图 7.39 所示。 在 SPI 控制器初始化时,SPI 驱动会检查该控制器下是否有挂载的 SPI NOR,有则添加到 SPI BUS 中。
aic_spi_probe(dev);
|-> spi_register_controller(ctlr);/spi_register_master(ctlr);
| // spi_register_master 是一个宏
|
|-> of_register_spi_devices(ctlr);
|-> spi = of_register_spi_device(ctlr, nc);
|-> spi = spi_alloc_device(ctlr);
|-> of_spi_parse_dt(ctlr, spi, nc);
|-> rc = spi_add_device(spi);
// 将 SPI device 添加到 SPI 总线 spi_bus_type 中
在调用 spi_add_device 的过程中,会查找和匹配对应设备的驱动程序(如果这时候对 应的驱动程序还没有被添加到系统中,则在这里先将设备添加到 Bus,等到对应驱动程序 被添加进来时,再进行匹配。)
| 模块 | 驱动源码路径 |
|---|---|
| SPI NOR | source/linux-5.10/drivers/mtd/spi-nor/ |
6.2.2. 检查和添加新设备
内核中所支持的 SPI NOR 设备通过两级列表进行设置。
首先检查 source/linux-5.10/drivers/mtd/spi-nor/core.c 中的 manufacturers, 查看新设备的厂商是否在列表之中:
static const struct spi_nor_manufacturer *manufacturers[] = {
&spi_nor_atmel,
&spi_nor_catalyst,
&spi_nor_eon,
&spi_nor_esmt,
&spi_nor_everspin,
&spi_nor_fujitsu,
&spi_nor_gigadevice,
&spi_nor_intel,
&spi_nor_issi,
&spi_nor_macronix,
&spi_nor_micron,
&spi_nor_st,
&spi_nor_spansion,
&spi_nor_sst,
&spi_nor_winbond,
&spi_nor_xilinx,
&spi_nor_xmc,
&spi_nor_boya,
};
再检查具体的设备厂商文件,具体的型号是否在列表之中( 以gigadevice 为例):
static const struct flash_info gigadevice_parts[] = {
......
{ "gd25q256", INFO(0xc84019, 0, 64 * 1024, 512,
SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ |
SPI_NOR_4B_OPCODES | SPI_NOR_HAS_LOCK |
SPI_NOR_HAS_TB | SPI_NOR_TB_SR_BIT6)
.fixups = &gd25q256_fixups },
......
};
此处检查,需要查找新设备的 Datasheet,找到该设备的 Manufacture 和 Device ID,并查看该 ID 是否出现在列表中。 例如此处为 0xc84019 ,其中 Manufacture ID = 0xc8, Device ID ID[158] = 0] = 0x40, ID[70x19 。
如果不存在,则参考上述例子,添加一个新的设备记录。
6.2.3. 修改 DTS
要在实际项目中使用 SPI NOR 设备,还需要修改 DTS 配置。
board.dts 应在具体的 SPI 控制器下添加 jedec,spi-nor 设备。
&spi0 {
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins_a>;
status = "okay";
spi-max-frequency = <100000000>;
spi-flash@0 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "jedec,spi-nor";
spi-max-frequency = <100000000>;
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
reg = <0>;
status = "okay";
};
};
同时还需在 board-u-boot.dtsi 文件中,将该设备标记为 u-boot,dm-pre-reloc ,不然 SPL 无法识别和使用。
&spi0 {
u-boot,dm-pre-reloc;
spi-flash@0 {
u-boot,dm-pre-reloc;
};
};