SPI NOR 使用指南
1. 配置指南
1.1. 驱动层次关系
SPI NOR 属于 SPI 的从设备,在内核中相关驱动通过 SPI MEM 对接到 SPI子系统。 在 SPI 控制器初始化时,SPI 驱动会检查该控制器下是否有挂载的 SPI NOR,有则添加到 SPI BUS 中。
aic_spi_probe(dev);
|-> spi_register_controller(ctlr);/spi_register_master(ctlr);// spi_register_master 是一个宏
|-> of_register_spi_devices(ctlr);
|-> spi = of_register_spi_device(ctlr, nc);
|-> spi = spi_alloc_device(ctlr);
|-> of_spi_parse_dt(ctlr, spi, nc);
|-> rc = spi_add_device(spi);
// 将 SPI device 添加到 SPI 总线 spi_bus_type 中
在调用 spi_add_device 的过程中,会查找和匹配对应设备的驱动程序(如果这时候对 应的驱动程序还没有被添加到系统中,则在这里先将设备添加到 Bus,等到对应驱动程序 被添加进来时,再进行匹配。)
| 模块 | 驱动源码路径 |
|---|---|
| Linux | source/linux-5.10/drivers/mtd/spi-nor/ |
| Uboot | source/uboot-2021.10/drivers/mtd/spi/ |
1.2. 修改 DTS
要在实际项目中使用 SPI NOR 设备,还需要修改 DTS 配置。
board.dts 应在具体的 SPI 控制器下添加 jedec,spi-nor 设备。
&spi0 {
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins_a>;
status = "okay";
spi-max-frequency = <100000000>;
spi-flash@0 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "jedec,spi-nor"; //固定值,所有基于 dts 的 SPI NOR 均声明此
spi-max-frequency = <100000000>; //最大频率,固定值
spi-tx-bus-width = <4>;
spi-rx-bus-width = <4>;
reg = <0>; //固定值,一般不需修改
status = "okay";
};
};
同时还需在 board-u-boot.dtsi 文件中,将该设备标记为 u-boot,dm-pre-reloc ,不然 SPL 无法识别和使用。
&spi0 {
u-boot,dm-pre-reloc;
spi-flash@0 {
u-boot,dm-pre-reloc;
};
};
1.3. Bus Width
宽总线的 SPI NOR 芯片可以工作在窄总线下,如4线的 SPI NOR 配置为1线也可以工作,但读写速度损失, 但窄总线设备无法工作在宽总线模式下,因此 spi-tx-bus-width 要正确设置
- 标准 SPI NOR 配置为1
- Dual SPI NOR 配置为2
- Quad SPI NOR 配置为4
2. U-Boot 移植
SPI NOR 要工作既需要 SOC 端 SPI 模块的驱动能力,也需要对 SPI NOR 模块的正确配置,本章阐述如何进行 SPI NOR 器件的移植工作,以 CFX 的 GM25Q128A 和 FudanMicro 的 FM25Q128 为例
U-Boot 中 对不同厂家的 SPI NOR 器件的管理集成度很高, 主要代码在 source/uboot-2021.10/drivers/mtd/spi/spi-nor-ids.c 中,添加一款新厂家的新器件需要经过如下步骤
2.1. Kconfig
添加厂家的宏定义
config SPI_FLASH_FMSH
bool "FudanMicro SPI flash support"
help
Add support for various FMSH (Shanghai Fudan Microelectronics Group Company)
SPI flash chips (FM25xxx).
config SPI_FLASH_CFX
bool "CFX SPI flash support"
help
Add support for various CFX (Zhuhai ChuangFeiXin-Technology)
SPI flash chips (GM25xxx).
2.2. spi-nor-ids
在 spi-nor-ids.c 的 spi_nor_ids 结构中添加 FMHS 和 CFX 的相关器件的支持
#ifdef CONFIG_SPI_FLASH_FMSH
/* Shanghai Fudan Microelectronics Group Company */
{ INFO("FM25Q128", 0xa14017, 0, 64 * 1024, 256, SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ) },
{ INFO("FM25Q64", 0xa14018, 0, 64 * 1024, 128, SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ) },
#endif
#ifdef CONFIG_SPI_FLASH_CFX
/* Zhuhai ChuangFeiXin Technology */
{ INFO("GM25Q128A", 0x1c4018, 0, 64 * 1024, 256, SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ) },
#endif
2.3. flash_info
flash_info 数据结构主要用来描述某一颗 SPI NOR 的参数,通过 INFO 宏来设置,其详细结构为:
struct flash_info {
char *name; //器件名称,一般用器件编号替代
u8 id[SPI_NOR_MAX_ID_LEN]; //JEDEC 授权的器件ID
u8 id_len; //ID 长度,填0,自动计算
unsigned sector_size; //sector size,现在的意义已经改变
u16 n_sectors; //sector 数目,通过 flash size 和 sector size 计算出来
u16 page_size; //页大小, INFO 宏固定为256
u16 addr_width; //board.dts 中配置
u32 flags; //功能标识
2.3.1. JEDEC ID
和 SPI NAND 不同, SPI NOR 的 ID 包含 Manufacture ID 和 Device ID 等多项内容,一般为24位,描述方式为
| 阈值 | 名称 | 示例 | 标记方式 |
|---|---|---|---|
| MID7 - IDF0 | Maunfacture ID | 0xa1 | JEDEC 分配 |
| D15 - D8 | Memory Type | 0x40 | 0x9F 命令 |
| D7 - D0 | Memory Desity | 0x17 | 0x9F 命令 |
不同厂家在数据手册中描述方法不一样,但现代的 SPI NOR 的 MID 一般通过 “Maunfacture/MID” 等字段标注,Device ID的(D15 - D0) 一般通过 0x9F 命令标注, 因此在数据手册中通过搜索 9F 一般能构造出 JEDEC ID, 如下图所示
- 0xC84018
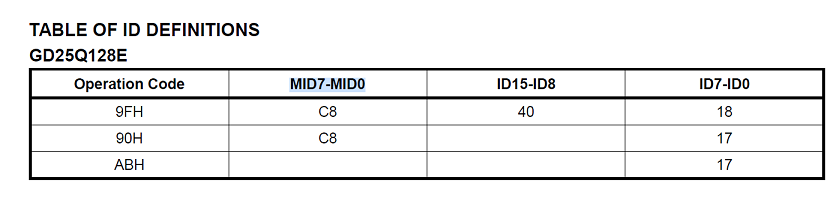
- 0xC22018
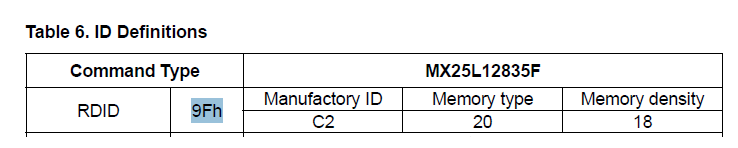
- 0xA14017

2.3.2. sector_size
Sector Size 是个历史产物,不管是文件系统还是厂家的器件规格都开始对外提供基于 Block 的接口,但在名称上还保留了 Sector 的名称,而驱动中则已经完全切换到 Block 的逻辑
Sector Size 主要定义的是擦除参数,一般的器件提供三种擦除操作
| 操作方式 | 命令 | 擦除大小 | 备注 |
|---|---|---|---|
| Sector Erase( SE) | 0x20 | 4K | 基础能力,主要做兼容,不做主力 |
| 32K Block Erase (BE) | 0x52 | 32K | 不再使用,和 BE-64 成对 |
| 64K Block Erase (BE) | 0xD8 | 64K | 大部分都支持,如果不支持则必须支持SE |
在驱动中,Sector_Size 描述的实际是 BE-64 的参数,而 BE-64 要求的 size 又是固定的 64K,因此该参数的设置原则是:
- 在数据手册中,如果支持 64K Block Erase (0xD8)命令,则设置为 ‘64 * 1024’
- 在数据手册中, 如果不支持 64K Block Erase (0xD8)命令,则设置为 ‘4 * 1024’

2.3.3. n_sectors
Sector (Block) 数目通过计算得到, 计算公式为 ((flash size)/ sector size),需要注意不同参数使用 Byte(B) 还是 bit(b) 描述
- gd25q128: 128Mb / 64KB = 256
- FM25Q128: 128Mb / 64KB = 256
- FM25Q64: 64Mb / 64KB = 128
2.3.4. flags
flags用来设置额外的功能标志
- SECT_4K 建议均设置,此功能用来兼容 Sector Erase( SE) 的支持,在一些特殊情况下可以继续工作
- 如果支持 0xBB 命令,则打开 SPI_NOR_DUAL_READ
- 如果支持 0xEB 命令,则打开 SPI_NOR_QUAD_READ
- 如果有 Status Register,则打开 USE_FSR,是一种状态呈现,非必须

2.4. 总结
- U-Boot 中移植一款 SPI NOR,最重要的是 JEDEC ID,通过在数据手册中查找 0x9F 命令获得
- 其他的参数都可以默认设置,INFO(0xa14017, 0, 64 * 1024, n_sectors, SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ)
3. Linux 移植
SPI NOR 驱动 Linux 和 U-Boot 的驱动不一样,Linux 中驱动更复杂一些,本章阐述如何在 Linux 中进行 SPI NOR 器件的移植工作,以 Gigadevice 的 gd25q128 和 FudanMicro 的 FM25Q128 为例
3.1. 文件准备
相较于 SPI NAND 器件, SPI NOR 的接口更加标准,但为了统一管理的方便,还是会为某一个公司创建一个文件进行管理,如果该公司的文件已经存在,则直接添加新器件支持即可
- 在source/linux-5.10/drivers/mtd/spi-nor/ 下建相应公司的标识的文件,如 fmsh.c cfx.c
- 在Makefile中添加该文件的编译: spi-nor-objs += fmsh.o
- 在source/linux-5.10/drivers/mtd/spi-nor/core.h 中声明 extern const struct spi_nor_manufacturer spi_nor_fmsh;
3.2. 驱动索引
内核中所支持的 SPI NOR 设备通过两级列表进行设置。
首先检查 source/linux-5.10/drivers/mtd/spi-nor/core.c 中的 manufacturers, 查看新设备的厂商是否在列表之中:
static const struct spi_nor_manufacturer *manufacturers[] = {
&spi_nor_atmel,
&spi_nor_catalyst,
&spi_nor_eon,
&spi_nor_esmt,
&spi_nor_everspin,
&spi_nor_fujitsu,
&spi_nor_gigadevice,
&spi_nor_intel,
&spi_nor_issi,
&spi_nor_macronix,
&spi_nor_micron,
&spi_nor_st,
&spi_nor_spansion,
&spi_nor_sst,
&spi_nor_winbond,
&spi_nor_xilinx,
&spi_nor_xmc,
&spi_nor_boya,
};
再检查具体的设备厂商文件,具体的型号是否在列表之中( 以gigadevice 为例):
static const struct flash_info gigadevice_parts[] = {
......
{ "gd25q128", INFO(0xc84018, 0, 64 * 1024, 256,
SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ |
SPI_NOR_HAS_LOCK | SPI_NOR_HAS_TB) },
......
};
此处检查,需要查找新设备的 Datasheet,找到该设备的 Manufacture 和 Device ID,并查看该 ID 是否出现在列表中。 例如此处为 0xc84018 ,其中 Manufacture ID = 0xc8, Device ID ID[158] = 0] = 0x40, Device ID[70x18 。
3.3. spi_nor_manufacturer
该结构为第一级索引,用来描述器件厂家的信息
SPI NOR 的接口和操作命令很统一,基本没有需要特殊处理的命令
const struct spi_nor_manufacturer spi_nor_fmsh = {
.name = "FudanMicro", //厂家名字标识
.parts = fmsh_parts, //本驱动支持的器件
.nparts = ARRAY_SIZE(fmsh_parts), //支持的器件的个数
};
3.4. flash_info
虽然和 U-Boot 的代码结构不同,但 flash_info 的描述基本类似,详细信息参考 U-Boot 的章节: flash_info
3.5. id_table
除了使用 dts 的 .compatible = “jedec,spi-nor” 统一匹配所有的 SPI NOR 外,驱动还兼容使用非标准 dts 的使用方式, 即直接在 dts 文件中描述要使用的 SPI NOR 的型号, 但这会造成固件和器件的紧耦合,不推荐使用
static struct spi_mem_driver spi_nor_driver = {
.spidrv = {
.driver = {
.name = "spi-nor",
.of_match_table = spi_nor_of_table,
},
.id_table = spi_nor_dev_ids,
},
static const struct spi_device_id spi_nor_dev_ids[] = {
/*
* Entries not used in DTs that should be safe to drop after replacing
* them with "spi-nor" in platform data.
*/
{"s25sl064a"}, {"w25x16"}, {"m25p10"}, {"m25px64"},
/*
* Entries that were used in DTs without "jedec,spi-nor" fallback and
* should be kept for backward compatibility.
*/
{"at25df321a"}, {"at25df641"}, {"at26df081a"},
{"mx25l4005a"}, {"mx25l1606e"}, {"mx25l6405d"}, {"mx25l12805d"},
{"mx25l25635e"},{"mx66l51235l"},
{"n25q064"}, {"n25q128a11"}, {"n25q128a13"}, {"n25q512a"},
{"s25fl256s1"}, {"s25fl512s"}, {"s25sl12801"}, {"s25fl008k"},
{"s25fl064k"},
3.6. 总结
- 移植一款 SPI NOR,最重要的是 JEDEC ID,通过在数据手册中查找 0x9F 命令获得
- 其他的参数都可以默认设置,INFO(0xa14017, 0, 64 * 1024, n_sectors, SECT_4K | SPI_NOR_DUAL_READ | SPI_NOR_QUAD_READ)
- 推荐使用标准 dts 进行 SPI NOR 的兼容