驱动支持
1. Clock 驱动
本章节描述 ArtInChip 平台的 U-Boot 时钟配置相关内容。
1.1. 驱动框架
U-Boot 驱动模型支持 Clock,ArtInChip 平台中 Clock 驱动基于该框架进行实现。 相关配置为:
- CONFIG_CLK
- CONFIG_CLK_ARTINCHIP
- CONFIG_CLK_ARTINCHIP_CMU
- CONFIG_SPL_CLK_ARTINCHIP
- CONFIG_SPL_CLK_ARTINCHIP_CMU
相关源码有:
include/clk.hinclude/clk-uclass.hdrivers/clk/clk.cdrivers/clk/clk-uclass.cdrivers/clk/artinchip/clk-aic.hdrivers/clk/artinchip/clk-artinchip.cdrivers/clk/artinchip/clk-cmu.c
1.2. 驱动接口
相关的 Clock 驱动接口有:
int clk_get_by_index_platdata(struct udevice *dev, int index,
struct phandle_1_arg *cells, struct clk *clk);
int clk_get_by_index(struct udevice *dev, int index, struct clk *clk);
int clk_get_by_index_nodev(ofnode node, int index, struct clk *clk);
int clk_get_bulk(struct udevice *dev, struct clk_bulk *bulk);
int clk_get_by_name(struct udevice *dev, const char *name, struct clk *clk);
int clk_release_all(struct clk *clk, int count);
int clk_enable(struct clk *clk);
int clk_disable(struct clk *clk);
ulong clk_set_rate(struct clk *clk, ulong rate);
ulong clk_get_rate(struct clk *clk);
1.3. 初始化和使用
通常硬件设备初始化时,需要配置对应的时钟。Clock 驱动的 probe 在时钟设备第一次被获取时触发。
clk_get_by_index(); // drivers/clk/clk-uclass.c
|-> clk_get_by_index_tail();
|-> uclass_get_device_by_ofnode(UCLASS_CLK, args->node, &dev_clk);
|-> uclass_find_device_by_ofnode(id, node, &dev);
|-> uclass_get_device_tail(dev, ret, devp); // drivers/core/uclass.c
|-> device_probe(dev); // drivers/core/device.c
|-> drv->probe(dev);
aic_clk_probe(dev);
// drivers/clk/artinchip/clk-cmu.c
设备使用的时钟通过时钟树进行管理。在时钟树中,每一个时钟都被分配一个具体的 ID, 并且在 DTS 中配置给需要的硬件设备。设备初始化时,通过 FDT 获取对应的时钟设备。
DTS 中时钟配置示例:
dma: dma-controller@10000000 {
compatible = "artinchip,aic-dma";
...
clocks = <&ccu CLK_DMA>;
...
};
相关 ID 定义可参考:
include/dt-bindings/clock/artinchip,aic-cmu.h
获取时钟设备的流程:
clk_get_by_index(dev, index, clk); // drivers/clk/clk-uclass.c
| // 此处 index 是 DTS 中配置给该设备的第几个时钟
|
|-> clk_get_by_index_tail();
|-> uclass_get_device_by_ofnode(UCLASS_CLK, args->node, &dev_clk);
|-> clk_of_xlate_default(clk, args);
|-> clk->id = args->args[0]; // 获取到具体的时钟 ID
需要设置和获取相关时钟信息时,通过 clk->id 访问时钟树。
clk_set_rate(clk, rate); // drivers/clk/clk-uclass.c
|-> ops->set_rate(clk, rate);
artinchip_clk_set_rate(clk, rate); // drivers/clk/artinchip/clk-artinchip.c
|-> aic_get_clk_info(priv->tree, clk->id, &index);
// 驱动内部,使用 clk-id 获取对应的时钟节点
2. Reset 驱动
本章节描述 ArtInChip 平台的 U-Boot 复位驱动相关内容。
2.1. 驱动框架
U-Boot 驱动模型支持 Reset,ArtInChip 平台中 Reset 驱动基于该框架进行实现。 相关配置为:
- CONFIG_DM_RESET
- CONFIG_RESET_ARTINCHIP
相关源码有:
include/reset.hinclude/reset-uclass.hdrivers/reset/reset-uclass.cdrivers/reset/reset-artinchip.c
2.2. 驱动接口
相关的复位驱动接口有:
int reset_get_by_index(struct udevice *dev, int index,
struct reset_ctl *reset_ctl);
int reset_get_by_name(struct udevice *dev, const char *name,
struct reset_ctl *reset_ctl);
int reset_get_by_index_nodev(ofnode node, int index,
struct reset_ctl *reset_ctl);
int reset_get_bulk(struct udevice *dev, struct reset_ctl_bulk *bulk);
int reset_request(struct reset_ctl *reset_ctl);
int reset_free(struct reset_ctl *reset_ctl);
int reset_assert(struct reset_ctl *reset_ctl);
int reset_deassert(struct reset_ctl *reset_ctl);
2.3. 初始化和使用
通常硬件设备初始化时,需要对其进行一次复位。Reset 驱动的 probe 在复位控制器第一次被获取时触发。
reset_get_by_index(); // drivers/reset/reset-uclass.c
|-> reset_get_by_index_tail(ret, dev_ofnode(dev), &args, "resets",
| index > 0, reset_ctl);
|-> uclass_get_device_by_ofnode(UCLASS_RESET, args->node, &dev_reset);
|-> uclass_find_device_by_ofnode(id, node, &dev);
|-> uclass_get_device_tail(dev, ret, devp);
|-> device_probe(dev); // drivers/core/device.c
|-> drv->probe(dev);
artinchip_reset_probe(dev);
// drivers/reset/reset-artinchip.c
系统给每一个设备的复位控制器分配了一个 ID,并且在设备的 DTS 配置中将 ID 分配到具体的设备。 设备初始化时,通过 FDT 的配置获取相应的复位控制设备。
DTS 中复位控制器配置示例:
dma: dma-controller@10000000 {
compatible = "artinchip,aic-dma";
...
resets = <&rst RESET_DMA>;
...
};
相关 ID 定义可参考:
include/dt-bindings/reset/artinchip,aic-reset.h
获取复位控制器的流程:
reset_get_by_index(dev, index, reset_ctl); // drivers/reset/reset-uclass.c
| // 此处 index 是 DTS 中配置给该设备的第几个复位控制设备
|
|-> reset_get_by_index_tail();
|-> uclass_get_device_by_ofnode(UCLASS_RESET, args->node, &dev_reset);
|-> resetof_xlate_default(reset_ctl, args);
|-> reset_ctl->id = args->args[0]; // 获取到具体的复位控制器 ID
需要对设备进行复位时,通过 reset_ctl->id 进行访问和设置硬件。
reset_assert(reset_ctl); // drivers/reset/reset-uclass.c
|-> ops->rst_assert(reset_ctl);
artinchip_reset_assert(reset_ctrl); // drivers/reset/reset-artinchip.c
3. DMA 驱动
此处描述的 DMA 是 ArtInChip 平台上的系统 DMA。一些硬件 IP 内部自带的 DMA 不在这里描述的范围。
3.1. 驱动框架
U-Boot 驱动模型支持 DMA,ArtInChip 平台中 DMA 驱动基于该框架进行实现。 相关配置为:
- CONFIG_DMA
- CONFIG_ARTINCHIP_DMA
相关源码有:
include/dma.hdrivers/dma/dma-uclass.cdrivers/dma/artinchip_dma.c
3.2. 驱动接口
常用接口
int dma_enable(struct dma *dma);
int dma_disable(struct dma *dma);
int dma_request(struct udevice *dev, struct dma *dma);
int dma_free(struct dma *dma);
int dma_memcpy(void *dst, void *src, size_t len);
int dma_prepare_rcv_buf(struct dma *dma, void *dst, size_t size);
int dma_receive(struct dma *dma, void **dst, void *metadata);
int dma_send(struct dma *dma, void *src, size_t len, void *metadata);
3.3. 实现说明
ArtInChip 平台上有一个系统 DMA,其支持8个通道同时工作。如规格书所定义,DMA 可以在不同的硬件 IP 之间搬运数据,系统为各硬件 IP 分配了固定的数据端口号。 使用 DMA 时,软件需要先申请到一个空闲的 DMA 通道,并将源数据端口和目标数据端口等信息配置给 DMA 通道,然后启动 DMA 进行工作。
然而上述的描述和使用方式并不能直接对应到 DTS 的配置方式以及 U-Boot 中的 DMA 表示方式, 中间需要做一些转换和说明。
在 DTS 中,可以描述某个控制器是否支持 DMA,并且配置所使用的 DMA ID 号。 在 ArtInChip 平台中,实际只有一个 DMA,各硬件 IP 共享使用。在配置 DTS 时, 使用设备对应的 DMA 数据端口号作为 DMA ID,在运行时再给该 ID 分配可用的 DMA 通道。
如下面的示例:
spi0: spi@10400000 {
compatible = "artinchip,aic-spi-v1.0";
reg = <0x0 0x10400000 0x0 0x1000>;
interrupts-extended = <&plic0 44 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cmu CLK_SPI0>;
resets = <&rst RESET_SPI0>;
dmas = <&dma DMA_SPI0>, <&dma DMA_SPI0>;
dma-names = "rx", "tx";
#address-cells = <1>;
#size-cells = <0>;
spi-max-frequency = <24000000>;
};
这里的 DMA 配置中,描述了 SPI0 控制器使用两个 DMA,分别是 “rx”, “tx”,它们的 DMA ID 都是 SPI0 对应的 DMA 数据端口号 10。
上述的配置对应到 U-Boot 的 DMA 驱动实现时,会有一些问题。U-Boot DMA 在运行时使用下面的结构体表示:
struct dma {
struct udevice *dev;
unsigned long id;
};
DMA 的实例化在 DMA 驱动框架 dma-uclass.c 中进行,其中的 id 值即为 DTS 中配置的 DMA ID。这里两个 DMA 使用了相同的 ID 号,如果直接使用,无法区分不同 DMA 所映射的 DMA 通道。
ArtInChip 平台上通过对 DMA 结构体中的 id 进行了扩展,以方便区分实际使用的不同 DMA, 如下所示:
- bit[15:0] 表示 IP 端口号
- bit[31:16] 表示 DMA 通道号
在 DMA 创建时赋值端口号区域,DMA request 时赋值通道号区域。由于上述两个动作是在一个调用中完成的, 因此不会有问题:
dma_get_by_name(bus, "tx", &priv->tx_dma); // drivers/dma/dma-uclass.c
|-> dma_get_by_index(dev, index, dma); // drivers/dma/dma-uclass.c
|-> dma_of_xlate_default(dma, &args);
| |-> dma->id = args->args[0];
|
|-> dma_request(dev_dma, dma); // drivers/dma/dma-uclass.c
|-> aic_dma_request(dma); // drivers/dma/artinchip_dma.c
|-> phy_ch = aic_dma_phy_request(ud);
|-> dma->id |= (phy_ch << AIC_DMA_PHY_CH_OFF);
U-Boot 对 struct dma 结构体中 id 的定义是唯一标识,只要能够做 DMA 区分即可, 因此上述扩展不会造成其他问题。
3.4. 初始化流程
DMA 驱动的初始化,在 DMA 第一次被使用时触发进行。
情况1: DRAM DMA 数据传输
dma_memcpy(dst_buf, src_buf, len);// drivers/dma/dma-uclass.c
|-> dma_get_device(DMA_SUPPORTS_MEM_TO_MEM, &dev);
|-> uclass_first_device(UCLASS_DMA, &dev)
|-> uclass_find_first_device(id, index, &dev);
|-> uclass_get_device_tail(dev, ret, devp);
|-> device_probe(dev); // drivers/core/device.c
|-> drv->probe(dev);
aic_dma_probe(dev); // drivers/dma/artinchip_dma.c
情况2: 根据 DTS 配置申请 DMA
dma_get_by_name(bus, "tx", &priv->tx_dma); // drivers/dma/dma-uclass.c
|-> dma_get_by_index(dev, index, dma); // drivers/dma/dma-uclass.c
|-> uclass_get_device_by_ofnode(UCLASS_DMA, args.node, &dev_dma);
| // drivers/core/uclass.c
|-> uclass_find_device_by_ofnode(id, node, &dev);
|-> uclass_get_device_tail(dev, ret, devp);
|-> device_probe(dev); // drivers/core/device.c
|-> drv->probe(dev);
aic_dma_probe(dev); // drivers/dma/artinchip_dma.c
4. SPI 驱动
SPI 在 U-Boot 中主要用于支持 SPI NAND/NOR 存储设备。目前 ArtInChip 平台上 SPI 的实现只支持半双工模式(Half-duplex)。
4.1. 驱动框架
U-Boot 驱动模型支持 SPI,ArtInChip 平台中 SPI 驱动基于该框架进行实现。 相关配置为:
- CONFIG_DM_SPI
- CONFIG_SPI
- CONFIG_SPL_SPI_SUPPORT
- CONFIG_ARTINCHIP_SPI
相关源码有:
drivers/spi/spi-uclass.cinclude/spi.hdrivers/spi/artinchip_spi.c
4.2. 驱动接口
常用接口:
int dm_spi_claim_bus(struct udevice *dev);
void dm_spi_release_bus(struct udevice *dev);
int dm_spi_xfer(struct udevice *dev, unsigned int bitlen,
const void *dout, void *din, unsigned long flags);
int spi_claim_bus(struct spi_slave *slave);
void spi_release_bus(struct spi_slave *slave);
int spi_xfer(struct spi_slave *slave, unsigned int bitlen, const void *dout,
void *din, unsigned long flags);
4.3. 初始化流程
SPI 设备挂载在 SPI 总线上,当 SPI 设备初始化时,如果父设备还没有被初始化, 则会自动触发父设备的初始化。下面是 SPI NAND 初始化时触发 SPI 初始化的流程。
mtd_probe(dev)
|-> device_probe(dev)
| // 此时 SPI 还没有 probe,则先 probe SPI
|-> device_probe(dev->parent); // drivers/core/device.c
| |-> drv->probe(dev);
| aic_spi_probe(dev); // drivers/spi/artinchip_spi.c
|
|-> drv->probe(dev);
spinand_probe(dev) // drivers/mtd/nand/spi/core.c
4.4. DMA 的支持
ArtInChip SPI 驱动支持使用 DMA 收发数据和使用 FIFO 通过 CPU 读写的方式收发数据, 在 DMA 使能的情况下,对于数据长度大于等于 SPI_FIFO_DEPTH 的传输,驱动自动切换使用 DMA 进行传输,否则默认使用 FIFO 模式。
如果系统没有使能 DMA,则所有传输都使用 FIFO 模式。
使能 DMA 的 Kconfig 配置为:
- CONFIG_ARTINCHIP_DMA
4.5. QUAD SPI 的支持
对于非存储 SPI 设备,SPI 驱动只支持标准 SPI 模式,即 Single Mode,数据传输都使用一根线进行(MOSI 和 MISO)。 对于 SPI 存储设备(SPI NAND/SPI NOR),通过对接 spi-mem 框架,可以支持 DUAL SPI 和 QUAD SPI。
相关代码:
static const struct spi_controller_mem_ops aic_spi_mem_ops = {
.supports_op = aic_spi_mem_supports_op,
.exec_op = aic_spi_mem_exec_op,
};
static const struct dm_spi_ops aic_spi_ops = {
.claim_bus = aic_spi_claim_bus,
.release_bus = aic_spi_release_bus,
.xfer = aic_spi_xfer,
.set_speed = aic_spi_set_speed,
.set_mode = aic_spi_set_mode,
.mem_ops = &aic_spi_mem_ops,
};
通过设置 .exec_op ,SPI MEM 设备的所有操作都由 aic_spi_mem_exec_op 进行处理。 由于该接口可以获取到 SPI 操作的数据位宽等详细信息,驱动可以为每一个传输操作设置准确的模式(Single/Dual/Quad)。
5. SPI NAND 驱动
本章节描述 SPI NAND 驱动的相关配置和使用。
5.1. 驱动框架
SPI NAND 的操作基于 SPI 命令,除了个别型号可能有不同之外,基本上操作和行为都是一致的, 所以 U-Boot 中已经实现了共用版本的 SPI NAND 驱动,具体器件只需要添加小部分驱动代码即可。
相关配置:
- CONFIG_MTD
- CONFIG_DM_SPI
- CONFIG_SPI_MEM
- CONFIG_MTD_SPI_NAND
- CONFIG_SPL_SPI_NAND_ARTINCHIP
具体源码在:
drivers/mtd/nand/spi/
5.2. 驱动接口
SPI NAND 属于 MTD 设备,使用 MTD 相关接口。具体参考:
include/linux/mtd/mtd.h
5.3. 初始化和读写
SPI NAND 是挂载在 SPI 总线上的 MTD 设备,初始化 probe 在 MTD 设备第一次被使用时触发。 调用 mtd_probe_devices() 是对 MTD 设备驱动初始化的常用方式。
mtd_probe_devices(void)
|-> mtd_probe_uclass_mtd_devs(void) // drivers/mtd/mtd_uboot.c
| // 通过 while 循环,逐个 UCLASS_MTD 设备 find
|-> uclass_find_device(UCLASS_MTD, idx, &dev)
|-> mtd_probe(dev)
|-> device_probe(dev)
|-> spinand_probe(dev) // drivers/mtd/nand/spi/core.c
| // spinand = dev_get_priv(dev);
| // slave = dev_get_parent_priv(dev);
| // mtd = dev_get_uclass_priv(dev);
| // nand = &spinand->base;
| //
| // spinand->slave = slave;
|
|-> spinand_init(spinand);
| |-> spinand_detect(spinand);
| | |-> spinand_manufacturer_detect(spinand);
| | | // drivers/mtd/nand/spi/core.c
| | |-> spinand_manufacturers[i]->ops->detect(spinand);
| | // 尝试厂商的 detect 函数
| |
| |-> spinand_manufacturer_init(spinand);
| |-> nanddev_init(nand, &spinand_ops, THIS_MODULE);
| | | // drivers/mtd/nand/core.c
| | | // mtd->type = memorg->bits_per_cell == 1 ?
| | | // MTD_NANDFLASH : MTD_MLCNANDFLASH;
| | |
| | |-> nanddev_bbt_init(nand) // drivers/mtd/nand/bbt.c
| | // 此处仅申请标记坏块的 Cache 空间,不做坏块检查
| |
| |-> // mtd = spinand->base.mtd
| //
| // mtd->_read_oob = spinand_mtd_read;
| // mtd->_write_oob = spinand_mtd_write;
| // mtd->_block_isbad = spinand_mtd_block_isbad;
| // mtd->_block_markbad = spinand_mtd_block_markbad;
| // mtd->_block_isreserved = spinand_mtd_block_isreserved;
| // mtd->_erase = spinand_mtd_erase;
| //
| // 此处完成 mtd 的初始化
|
|-> add_mtd_device(mtd);
|-> idr_alloc(&mtd_idr, mtd, 0, 0, GFP_KERNEL);
// 添加到 mtd_idr 列表中
NAND 存储设备在访问前,通常要做一次坏块检查。U-Boot 中在添加分区的时候进行检查坏块:
do_mtd_list(); // cmd/mtd.c
|-> mtd_probe_devices(); // drivers/mtd/mtd_uboot.c
|-> add_mtd_partitions(); // drivers/mtd/mtdpart.c
|-> allocate_partition(); // drivers/mtd/mtdpart.c
| | // 这里做坏块统计
| |-> mtd_block_isbad(); // drivers/mtd/mtdcore.c
| |-> mtd->_block_isbad(mtd, ofs);
| spinand_mtd_block_isbad(); // drivers/mtd/nand/spi/core.c
| |-> nanddev_isbad(); // drivers/mtd/nand/core.c
| |-> spinand_isbad(); // drivers/mtd/nand/spi/core.c
| |-> spinand_read_page();
|
|-> add_mtd_device(slave); // drivers/mtd/mtdcore.c
上层应用,如 mtd 命令和 UBI,通过 mtd_read / mtd_write API 进行读写等操作。
mtd_read
|-> mtd->_read_oob(mtd, from, &ops);
part_read_oob(mtd, from, &ops); // drivers/mtd/mtdpart.c
|-> mtd->parent->_read_oob(mtd->parent, from + mtd->offset, ops);
spinand_mtd_read(mtd, from, &ops); // drivers/mtd/nand/spi/core.c
|-> spinand_read_page(spinand, &iter.req, enable_ecc);
|-> spinand_load_page_op(spinand, req);
| |-> spi_mem_exec_op(spinand->slave, &op); // drivers/spi/spi-mem.c
| |-> ops->mem_ops->exec_op(slave, op);
| aic_spi_mem_exec_op(slave, op);
| // drivers/spi/artinchip_spi.c
|
|-> spinand_read_from_cache_op(spinand, req);
|-> spi_mem_exec_op(spinand->slave, &op);
|-> ops->mem_ops->exec_op(slave, op);
aic_spi_mem_exec_op(slave, op);
// drivers/spi/artinchip_spi.c
mtd_write
|-> mtd->_write_oob(mtd, to, &ops);
part_write_oob(mtd, to, &ops); // drivers/mtd/mtdpart.c
|-> mtd->parent->_write_oob(mtd->parent, to + mtd->offset, ops);
spinand_mtd_write(mtd, to, &ops);
|-> spinand_write_page(spinand, &iter.req);
|-> spinand_write_enable_op(spinand);
|-> spinand_write_to_cache_op(spinand, req);
|-> spinand_program_op(spinand, req);
|-> spi_mem_exec_op(spinand->slave, &op); // drivers/spi/spi-mem.c
|-> ops->mem_ops->exec_op(slave, op);
aic_spi_mem_exec_op(slave, op);
// drivers/spi/artinchip_spi.c
5.4. 添加新器件
U-Boot 的代码仅配置了数量有限的 SPI NAND 器件,在使用新器件时,需要在代码中增加对新器件的支持。 由于只需配置有限的信息,并且具体的配置已经模板化,因此只需参照现有代码添加即可。
具体流程如下:
-
检查该器件的厂商是否在支持列表
查看
drivers/mtd/nand/spi/源码目录是否有该器件厂商的驱动。如winbond.c如果不存在,则需要添加新厂商支持。
-
添加新厂商支持之后,需要将将该厂商的配置添加到系统中
drivers/mtd/nand/spi/core.cstruct spinand_manufacturer *spinand_manufacturers[] -
检查厂商驱动中是否支持该器件
如
winbond.c中struct spinand_info winbond_spinand_table[]如果没有,则添加新器件到列表中即可。
6. SPI NOR 驱动
本章节描述 SPI NOR 驱动的相关配置和使用。
6.1. 驱动框架
待完善
6.2. 驱动接口
待完善
6.3. 初始化和读写
待完善
6.4. 添加新器件
待完善
7. MMC 驱动
本章节描述 MMC 驱动的相关配置和使用。
7.1. 驱动框架
U-Boot 驱动模型支持 MMC,并且通过块设备接口对 MMC 进行访问。ArtInChip 平台中, SPL 和 U-Boot 阶段都支持 MMC 已经块设备接口。 相关配置为:
- CONFIG_MMC
- CONFIG_DM_MMC
- CONFIG_SPL_DM_MMC
- CONFIG_BLK
- CONFIG_SPL_BLK
- CONFIG_MMC_ARTINCHIP
相关源码有:
include/mmc.hinclude/blk.hdrivers/block/blk-uclass.cdrivers/mmc/mmc-uclass.cdrivers/mmc/artinchip_mmc.c
7.2. 驱动接口
常用驱动接口:
unsigned long blk_dread(struct blk_desc *block_dev, lbaint_t start,
lbaint_t blkcnt, void *buffer);
unsigned long blk_dwrite(struct blk_desc *block_dev, lbaint_t start,
lbaint_t blkcnt, const void *buffer);
unsigned long blk_derase(struct blk_desc *block_dev, lbaint_t start,
lbaint_t blkcnt);
struct mmc *mmc_create(const struct mmc_config *cfg, void *priv);
int mmc_bind(struct udevice *dev, struct mmc *mmc,
const struct mmc_config *cfg);
void mmc_destroy(struct mmc *mmc);
int mmc_unbind(struct udevice *dev);
int mmc_initialize(bd_t *bis);
int mmc_init(struct mmc *mmc);
int mmc_send_tuning(struct mmc *mmc, u32 opcode, int *cmd_error);
int mmc_of_parse(struct udevice *dev, struct mmc_config *cfg);
int mmc_read(struct mmc *mmc, u64 src, uchar *dst, int size);
int mmc_set_clock(struct mmc *mmc, uint clock, bool disable);
7.3. 初始化和使用
本章节主要介绍 MMC 以及对应的 BLK 设备的初始化流程,以及读写流程。
7.3.1. 绑定阶段
使用时,MMC 设备通过 BLK 块设备接口进行使用。MMC 设备与 BLK 设备之间的关系如 图 3.4 所示。
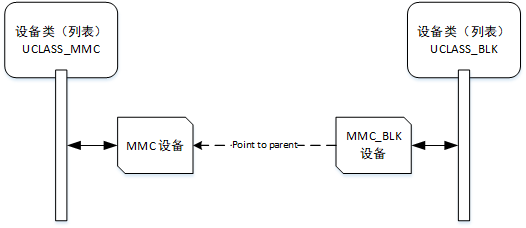
图 3.4 MMC 与 BLK 设备的关系
对于每一个 MMC 设备,在绑定阶段,都会创建一个对应的 MMC_BLK 块设备,并且 MMC_BLK 设备的 parent 指向当前 MMC 设备。 ArtInChip MMC 设备绑定对应的 MMC 设备驱动, MMC_BLK 设备绑定 mmc-uclass 中的 mmc_blk 驱动。
读写操作时,通过 mmc_blk 驱动的读写函数,转为对 mmc 的操作。
static const struct blk_ops mmc_blk_ops = { // drivers/mmc/mmc-uclass.c
.read = mmc_bread,
#if CONFIG_IS_ENABLED(MMC_WRITE)
.write = mmc_bwrite,
.erase = mmc_berase,
#endif
.select_hwpart = mmc_select_hwpart,
};
下面的绑定流程演示了创建 MMC_BLK 设备,并且进行关联的过程。
使用 PLATDATA 时
在 SPL 中,使能 PLATDATA 时的绑定流程如下。
reset // arch/arm/cpu/armv7/start.S
|-> _main // arch/arm/lib/crt0.S
|-> board_init_f(); // arch/arm/mach-artinchip/spl.c
|-> spl_early_init() // common/spl/spl.c
|-> spl_common_init(setup_malloc = true) // common/spl/spl.c
|-> dm_init_and_scan(!CONFIG_IS_ENABLED(OF_PLATDATA));
|-> dm_scan_platdata(pre_reloc_only=false)
|-> lists_bind_drivers();
|-> device_bind_by_name(parent, false, entry, &dev);
|-> drv = lists_driver_lookup_name(info->name);
| // 搜索 U_BOOT_DRIVER(name) 声明的 driver
|-> device_bind_common(); // drivers/core/device.c
|-> uclass_get(&uc);
|-> uclass_bind_device(dev);
|-> drv->bind(dev);
aic_dwmmc_bind(dev);
|
+----------------------------------+
|
aic_dwmmc_bind(dev); // drivers/mmc/artinchip_dw_mmc.c
|-> dwmci_bind(dev, ...); // drivers/mmc/dw_mmc.c
|
|-> mmc_bind(dev, &plat->mmc, &plat->cfg) // drivers/mmc/mmc-uclass.c
| // 绑定一个 IF_TYPE_MMC 的 Block 子设备,这样可以通过块设备的接口
| // 使用 MMC。
|
|-> blk_create_devicef(dev, "mmc_blk", "blk",IF_TYPE_MMC, devnum,
| | 512, 0, &bdev); // drivers/block/blk-uclass.c
| |-> blk_create_device(parent, "mmc_blk", dev_name, if_type,
| | devnum, blksz, lba, devp);
| |-> device_bind_driver(parent, drv_name, name, &dev);
| | // drivers/core/lists.c
| |-> ....
| |-> device_bind_common(dm_root, ...);
| |-> uclass_get(drv->id, &uc); id = UCLASS_BLK
| |-> dev = calloc(1, sizeof(struct udevice));
| | dev->name = name // 块设备名字
| | dev->parent = parent // 指向 MMC 设备
| | dev->driver = drv // "mmc_blk" driver
| | dev->uclass = uc // UCLASS_BLK
| | // 创建设备 mmc_blk
| |
| |-> uclass_bind_device(dev);
| // 将设备添加到 UCLASS_BLK 列表中
|
|-> dev_get_uclass_platdata(bdev);
使用 DTS 时
使用 DTS 时,SPL 和 U-Boot 中的绑定流程如下。在 DTS 中,MMC 控制器是 soc 的子节点, 挂载到 simple-bus 中,因此相关绑定在 soc 设备绑定 simple-bus 驱动后被触发, 因此在 simple_bus_post_build() 中处理。
U-Boot 阶段的 MMC 绑定在 initf_dm 中进行。
simple_bus_post_bind(); // drivers/core/simple-bus.c
|-> dm_scan_fdt_dev(dev); // drivers/core/root.c
|-> dm_scan_fdt_node();
|-> lists_bind_fdt(); // drivers/core/lists.c
| // 通过 compatible 匹配设备和驱动
|-> device_bind_with_driver_data();
|-> device_bind_common(); // drivers/core/device.c
|-> uclass_get(&uc)
|-> uclass_bind_device(dev)
|-> drv->bind(dev)
aic_dwmmc_bind(dev);
|
+------------------+
|
aic_dwmmc_bind(dev); // drivers/mmc/artinchip_dw_mmc.c
|-> dwmci_bind(dev, ...); // drivers/mmc/dw_mmc.c
|
|-> mmc_bind(dev, &plat->mmc, &plat->cfg); // drivers/mmc/mmc-uclass.c
| // 绑定一个 IF_TYPE_MMC 的 Block 子设备,这样可以通过块设备的接口
| // 使用 MMC。
|
|-> blk_create_devicef(dev, "mmc_blk", "blk",IF_TYPE_MMC, devnum,
| | 512, 0, &bdev); // drivers/block/blk-uclass.c
| |-> blk_create_device(parent, "mmc_blk", dev_name, if_type,
| | devnum, blksz, lba, devp);
| |-> device_bind_driver(parent, drv_name, name, &dev);
| | // drivers/core/lists.c
| |-> ....
| |-> device_bind_common(dm_root, ...);
| |-> uclass_get(drv->id, &uc); id = UCLASS_BLK
| |-> dev = calloc(1, sizeof(struct udevice));
| | dev->name = name; // 块设备名字
| | dev->parent = parent; // 指向 MMC 设备
| | dev->driver = drv; // "mmc_blk" driver
| | dev->uclass = uc; // UCLASS_BLK
| | // 创建设备 mmc_blk
| |
| |-> uclass_bind_device(dev);
| // 将设备添加到 UCLASS_BLK 列表中
|
|-> dev_get_uclass_platdata(bdev);
7.3.2. Probe 流程
SPL 中的 Probe 流程如下。由于 BLK 设备的 probe 的目的是调用 mmc_init() , 这里直接调用,所以不需要单独的 Probe 了。
spl_mmc_load(); // common/spl/spl_mmc.c
|-> spl_mmc_find_device(&mmc, bootdev->boot_device);
| |-> mmc_initialize(NULL); // drivers/mmc/mmc.c
| | |-> mmc_probe(bis);
| |-> uclass_get(UCLASS_MMC, &uc);
| |-> device_probe(dev); // drivers/core/device.c
| | // 这里对 UCLASS_MMC 列表中的设备逐个调用
| | // device_probe(dev)
| |
| |--> aic_dwmmc_probe(...) // 具体驱动的 probe
|
|-> mmc_init(mmc);
U-Boot 中 MMC 设备和对应的 BLK 设备 Probe 流程如下。
MMC 设备的 Probe 在 board_init_r() 调用 initr_mmc() 时进行。对应的 BLK 设备的 Probe 在第一次使用时进行,通常是 initr_env() ,该函数加载 MMC 上的环境变量。
board_init_r(gd_t *new_gd, ulong dest_addr)
|-> ...
|-> initr_dm(void)
|-> ...
|-> initr_mmc(void)
|-> initr_env(void)
initr_mmc(void)
|-> mmc_initialize(gd->bd); // drivers/mmc/mmc.c
|-> mmc_probe(bis = gd->bd);
|-> uclass_get(UCLASS_MMC, &uc);
|-> device_probe(dev); // drivers/core/device.c
| // 这里对 UCLASS_MMC 列表中的设备逐个调用
| // device_probe(dev)
|
|--> aic_dwmmc_probe(...) // 具体驱动的 probe
initr_env(void) // common/board_r.c
|
|-> env_relocate(void) // env/common.c
|-> env_load(void) // env/env.c
| // 这个函数执行读取环境变量的动作
|
|-> drv = env_driver_lookup(ENVOP_LOAD, prio)
| // u-boot 通过 U_BOOT_ENV_LOCATION 宏定义了各种可以用于加载
| // 环境变量的驱动 (struct env_driver),并且在 lds 中将这些
| // 驱动收集到一个固定的段中,这里遍历各个驱动,尝试加载 ENV
|
|-> drv->load()/env_mmc_load(void) // env/mmc.c
env_mmc_load();
|
+---------------+
|
env_mmc_load(); // env/mmc.c
|--> devno = mmc_get_env_dev();
|--> mmc = find_mmc_device(devno);
|--> init_mmc_for_env(mmc)
|--> blk_get_from_parent(mmc->dev, &dev)
|--> device_find_first_child(parent, &blkdev);
| // 获取 mmc_blk 设备
|
|--> device_probe(blkdev)
|--> mmc_blk_probe(...) // drivers/mmc/mmc-uclass.c
|--> mmc_init(mmc) // drivers/mmc/mmc.c
7.3.3. 读写流程
通过 BLK 接口对 MMC 进行读写的调用流程如下。
blk_dread(mmc_get_blk_desc(mmc), blk, cnt, addr);
| // drivers/block/blk-uclass.c
|
|--> ops->read(dev, start, blkcnt, buffer);
mmc_bread(dev, start, blkcnt, buffer); // drivers/mmc/mmc.c
|--> mmc_read_blocks(mmc, dst, start, cur); // drivers/mmc/mmc.c
|--> mmc_send_cmd(mmc, &cmd, &data) //drivers/mmc/mmc-uclass.c
|--> ops->send_cmd(dev, cmd, data);
dwmci_send_cmd(dev, cmd, data); // drivers/mmc/dw_mmc.c
blk_dwrite(mmc_get_blk_desc(mmc), blk, cnt, addr);
| // drivers/block/blk-uclass.c
|
|--> ops->write(dev, start, blkcnt, buffer);
mmc_bwrite(dev, start, blkcnt, buffer); // drivers/mmc/mmc_write.c
|-> mmc_write_blocks(mmc, start, cur, src); // drivers/mmc/mmc_write.c
|--> mmc_send_cmd(mmc, &cmd, &data) //drivers/mmc/mmc-uclass.c
|--> ops->send_cmd(dev, cmd, data);
dwmci_send_cmd(dev, cmd, data); // drivers/mmc/dw_mmc.c